대구경북과학기술원(DGIST)이 혈관에서 원하는 방향으로 이동할 수 있는 마이크로로봇을 개발했다. 심혈관 질환 시술 시간을 크게 줄여줄 것으로 기대된다.
DGIST는 최홍수 로봇공학전공 교수팀이 이병주 한양대 교수팀, 브래들리 넬슨 스위스취리히연방공대 교수팀과 공동으로 심근경색 가운데 만성완전폐쇄병변의 치료 성공률을 향상시킬 수 있는 '가이드와이어 부착형 마이크로로봇'을 개발했다고 27일 밝혔다.
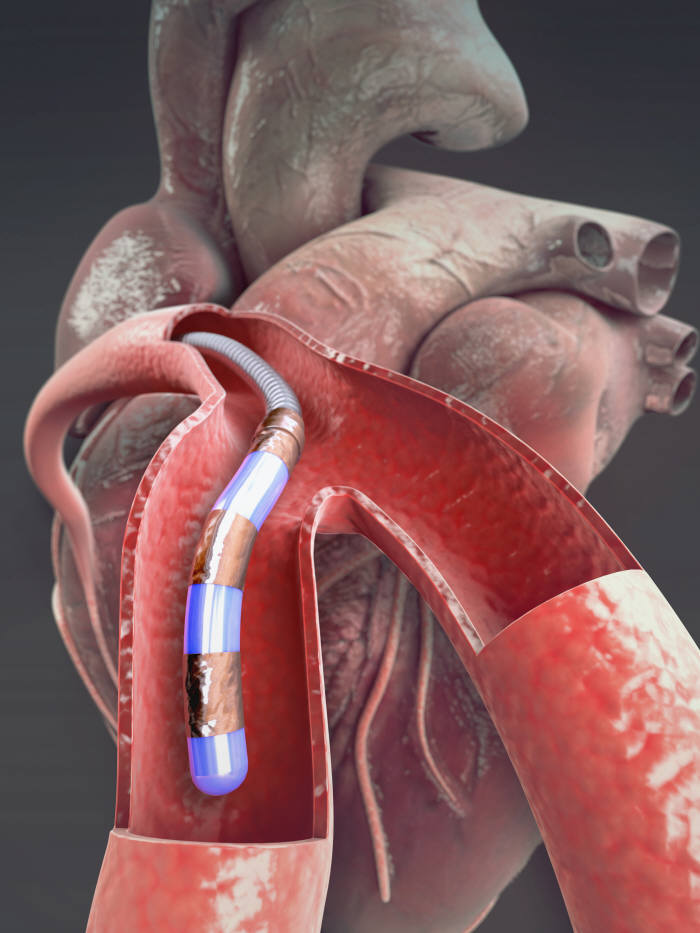
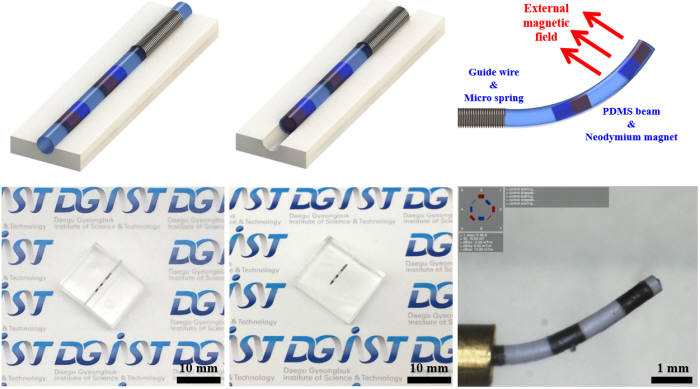
기존 가이드와이어는 시술자가 수동으로 제어해야 했기 때문에 다루기 어려웠다. 연구팀은 이러한 한계를 극복하기 위해 유연하면서 생체에 적합한 폴리머와 외부 자기장으로 방향과 위치를 제어할 수 있는 네오디듐 자석을 이용해 지름 500㎛, 길이 4㎜ 크기의 원통형 마이크로로봇을 만들어 가이드와이어 끝부분에 부착했다. 이 로봇은 복잡한 혈관을 통과하는 시험과 3차원 혈관 모형에서 원하는 부위에 도달하는 시험에 성공했다.
최홍수 교수는 “시술자 경험에 의존하던 수술과 달리 병인이 되는 부분을 정확하고 빠르게 찾아 안정적으로 시술할 수 있어 심장 질환 시술 시간을 단축시키고 성공률을 높일 수 있게 됐다”면서 “기업과 후속 연구를 진행해 실제 상용화를 추진하겠다”고 말했다.
대구=정재훈기자 jhoon@etnews.com