자동차가 스스로 운전할 수 있는 능력이 점점 높아지고 있다. 기존 자동차는 파워트레인, 조향장치, 제동장치, 타이어라는 기본 구성을 바탕으로 발전됐다. 여기에 사각지대 감지장치, 차로이탈경보유지장치, 긴급제동장치 등 다양한 운전자 보조장치가 더해졌다. 이미 일부 제조사와 기술업체는 자율주행차를 시범 운행하고 있다. 안타깝게도 사고로 인한 인명 피해도 발생한다.
안전에 대한 사회적 우려로 여러 법규와 표준이 준비되고 있다. 미국 자동차공학회(SAE) 기준 레벨3 이상의 자율주행 상황에서는 주위 환경을 모니터링하는 의무는 주행 시스템에 있다. 사고 시 책임이 제조사에 있기 때문에 문제를 미리 검토하고, 안전을 최대한 확보하기 위한 프로세스를 ISO/PAS 21448(SOTIF)에서 다루고 있다.
ISO 26262와 구별되는 SOTIF는 부족한 자율주행 경험을 채우기 위한 안전 관련 표준이다. 자율주행 개발을 위해서는 SOTIF를 통한 가상 환경에서의 인증과 검증이 필수적이다. 향후 더 높은 수준의 자율주행 레벨을 고려할 수 있겠지만 당분간은 자율주행차를 개발하고 제조하는 업체가 SOTIF 프로세스를 따라야 한다.
복잡해지는 차량 내 시스템과 자율주행의 안전성을 검증하기 위해서는 시뮬레이션으로 구현할 수 있는 △센서 모델 △교통 시나리오 △날씨 △주야간 상황 △여러 노이즈 모델 등에 대한 인증과 검증이 필요하다. 이는 소프트웨어(SW)뿐만 아니라 실제 하드웨어(HW), 제어 알고리즘, 실제 차량까지도 포함할 수 있는 플랫폼이어야 한다.
자율주행차 검증은 크게 시뮬레이션, 가상테스트, 실제테스트 세 단계로 구분할 수 있다. 모든 프로세스는 가상 환경을 기반으로 구축돼야 한다.
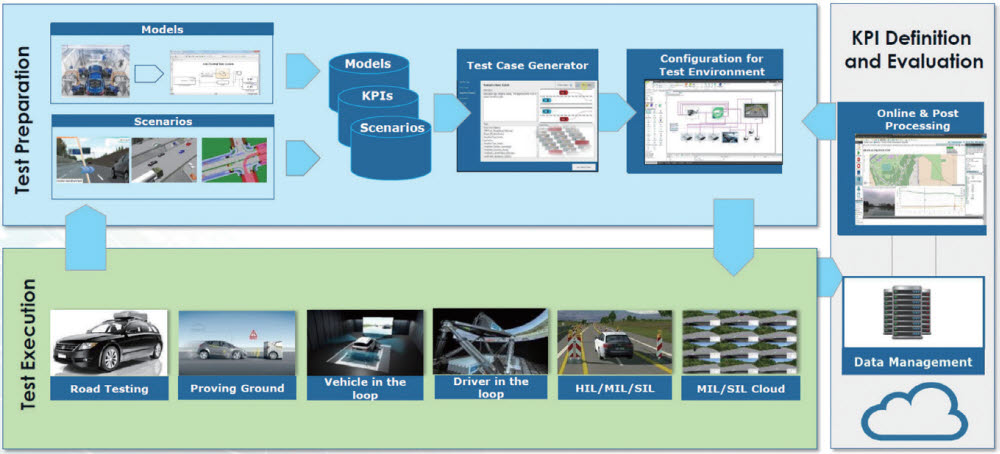
우선 시나리오 개발, 적절한 환경 모사, 시나리오 데이터베이스(DB) 생성이 필요하다. 시나리오 개발 시 법규, 핵심성과지표(KPI)와 같은 필요한 인증계획 및 과거 사례를 참조한 실도로 주행 환경 및 사고 발생(미래 상황)까지 반영해야 한다. 주야간, 일조량, 눈·비·안개 등 상황과 도로 인프라·신호체계·교통정보, 보행자·상대차량·건물 등 요소가 정량 제어되는 고정밀 지도 환경이 필요하다.
시뮬레이션 단계에서 설정된 시나리오는 단독으로 사용되기보다 확장하는 개념이 필요하다. 가상 테스트의 목적은 여러 시스템 통합을 통한 분석이다. 시뮬레이션만으로 검증하지 못하는 오작동, 시스템 오류 등을 찾아내 개선해야 한다.
실제 테스트는 규정에 따라 철저히 통제된 환경에서 실행돼야 한다. 가상 검증 플랫폼과 자연스럽게 연결돼 있다. 테스트를 위한 시나리오 준비, 실제 테스트 결과에 대한 평가 및 분석 등이 클라우드 기반에서 이뤄진다.
이처럼 자율주행 개발, 검증, 출시를 승인받는 과정은 매우 험난하다. 또 개발된 자율주행차의 대중화를 위해 공공 관점, 법률 관점, 기술 관점에서 고려될 사항이 있다. 이외에도 개발에 필요한 시간 및 비용 압박 등 해결해야 할 난제가 많다. 검토 사항을 실제 물리적으로 개발하고 검증하는 건 불가능하다. 이에 따라 인증 및 검증도 가상 환경에서 SW와 함께 구현돼야 하는 게 당연하다.
독일 보쉬의 한 임원은 오토파일럿 오작동 테스트를 위해 2억5000만㎞ 주행이 필요하다고 했다. 도요다 아키오 일본 토요타 회장은 자율주행차 개발 시 시뮬레이션을 포함해 142억㎞의 주행 테스트가 이뤄져야 한다고 추산했다.
어린 시절 '전격 Z작전'이라는 TV드라마를 보며 스스로 운전하고 인간과 교감하는 자동차가 언제쯤 나올지 기대한 기억이 난다. 하루빨리 이 기대가 현실화돼 자율주행차를 타고 일반 도로에서 안전하게 운행할 수 있는 날을 꿈꿔 본다.
손민혁 한국AVL AST(Advanced Simulation Technologies) 총괄부서장 minhyuk.son@avl.com