볼보, 저속 자동 주행 자동차 개발

도로 정체로 인해 천천히 주행해야 할 때, 운전자의 조작 없이도 앞 차를 따라 스스로 이동하는 자동차가 곧 상용화된다. 볼보 자동차는 2014년 양산을 목표로 `트래픽 잼 어시스턴스(traffic jam assistance)` 시스템을 개발 중이라고 발표했다.

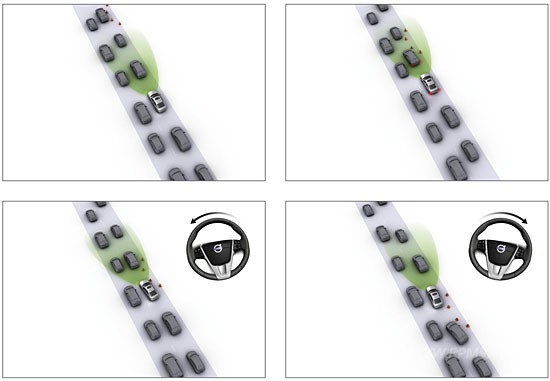
운전자가 버튼을 눌러 활성화시키면, 엔진과 브레이크, 조향 장치가 자동으로 작동하여 앞 차를 따라 적정 간격과 차선을 유지하면서 주행한다. 최대 50km/h까지 작동하며, 도로 상의 장애물을 인식해 피해 가는 기능을 갖추었다. 운전자는 언제든 운전에 복귀할 수 있다.
볼보는 이미 상용화되어 있는 어댑티브 크루즈 컨트롤과 차선 유지 기능을 통합해 이 시스템을 개발 중이며, 이를 통해 무인 주행 차량 개발에 한 걸음 더 다가간다.
한편, 몇 주 전 볼보는 고속도로에서 한 무리의 차들이 선도 차를 따라 자동 주행하는 SARTRE(Safe Road Trains for the Environment) 프로젝트를 시연하기도 했다.