국내 연구진이 열매 꼬투리가 마르며 접히는 힘으로 씨앗을 튕겨내는 제비꽃의 번식 비밀을 규명하고, 상처 봉합과 종양 절제 등에 활용 가능한 차세대 유연 로봇 개발 가능성을 제시했다.
과학기술정보통신부는 현유봉·김호영 서울대 교수 및 정소현 대구경북과학기술원(DGIST) 교수 공동 연구팀이 제비꽃 열매 꼬투리의 기하학적 구조를 통해 복잡한 장치 없이 힘을 제어하고 씨앗을 순차적으로 튕겨내는 원리를 규명하는데 성공했다고 밝혔다.
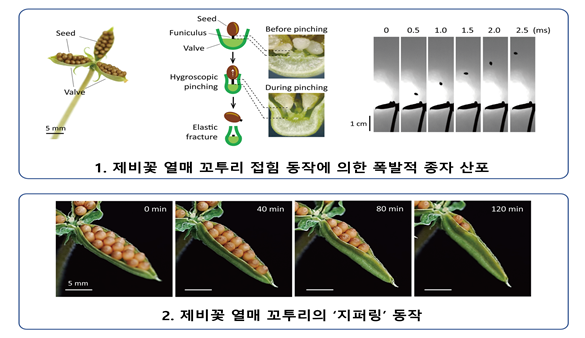
일반적인 식물은 열매가 터지면서 내부의 씨앗을 한꺼번에 사방으로 방출하는 폭발적 종자 산포 방식을 취하지만, 제비꽃은 열매 꼬투리가 마르면서 안쪽으로 오므라드는 힘을 이용해 내부에 든 씨앗을 차례로 튕겨 발사하는 독특한 방식을 쓴다.
씨앗을 순차적으로 발사하려면 씨앗을 밀어내는 힘의 중심점도 씨앗 위치에 맞춰 이동해야 한다. 이는 현대 로봇공학 기술로도 정밀한 모터나 제어 장치 없이는 구현하기 힘든 난제다. 하지만 제비꽃은 아주 작고 단순한 열매 꼬투리의 기하학적 구조만으로 이를 해결한다.
연구팀은 이 비밀을 풀기 위해 제비꽃 열매 꼬투리의 구조를 정밀 분석했다. 그 결과 효율적인 씨앗 발사는 열매 꼬투리가 건조되면서 마치 지퍼가 닫히듯 접히는 '지퍼링(zippering)' 동작 덕분임을 밝혀냈다. 꼬투리는 수분 함량에 따라 접힘을 유도하는 부위와 접힘 과정에서 씨앗에 직접 힘을 전달하는 매우 얇은 막 구조로 이뤄져 있다.
실제 제비꽃 시료와 이를 본뜬 인공 장치의 동작을 비교한 결과 열매 꼬투리 단면은 힘을 가장 강하게 낼 수 있는 '반원형 구조'로 진화해 왔음을 증명했다. 열매 꼬투리 양 끝 기하학적 조건과 모양 차이 덕분에 꼬투리가 접힐 때 발생하는 힘이 얇은 막을 타고 씨앗이 있는 특정 지점에만 완벽하게 집중된다. 이 힘의 중심점이 지퍼가 채워지듯 앞으로 점진적으로 이동하며, 나란히 줄 서 있는 씨앗들을 앞에서부터 차례대로 꼬집듯 밀어내는 원리다.
연구팀은 이번 연구를 통해 복잡한 모터나 배터리, 전선 없이 '구조의 힘'만으로 상처 봉합 및 종양 절제 등에 활용 가능한 차세대 유연 로봇을 개발할 가능성을 제시했다. 식물이 제한된 조건 속에서도 별도의 장치 없이 스스로 최적의 힘을 내는 물리적 지능을 공학적으로 입증한 것으로서, 향후 고효율 생체모방 공학 기술 개발에 새로운 통찰을 제공할 것으로 기대된다.
연구팀은 “이번 성과는 제비꽃이 최소한의 자원만으로 효율적인 힘을 전달하도록 열매 꼬투리의 구조를 영리하게 진화시켜 왔음을 밝혀낸 것”이라며 “복잡한 장치 없이 디자인만으로 정교한 움직임을 구현하는 차세대 소프트 소재 설계는 물론 상처 치료 패치나 생체모사 유연 로봇 등 의공학 분야 전반에 폭넓게 활용될 것으로 기대한다”고 말했다.
이번 연구 성과는 국제학술지 '사이언스'에 현지시간 18일 게재됐다.
이인희 기자 leeih@etnews.com