로봇 팔에는 가볍고 반복 운동이 가능한 구동 장치가 필요한데, 기존 모터 기반 시스템은 무겁고 구조가 복잡했다. 이런 가운데 한국과학기술원(KAIST·총장 이광형)이 모터 없이 1초 내에 빠르게 동작하는 스마트 소재 기반 구동 기술을 개발했다.
KAIST는 김성수 기계공학과 교수팀이 열과 같은 외부 자극에 반응해 스스로 형태를 바꾸고 다시 원래 상태로 돌아올 수 있는 '양방향 형상 기억물질 기반 하이브리드 스마트 액추에이터'를 개발했다고 22일 밝혔다.
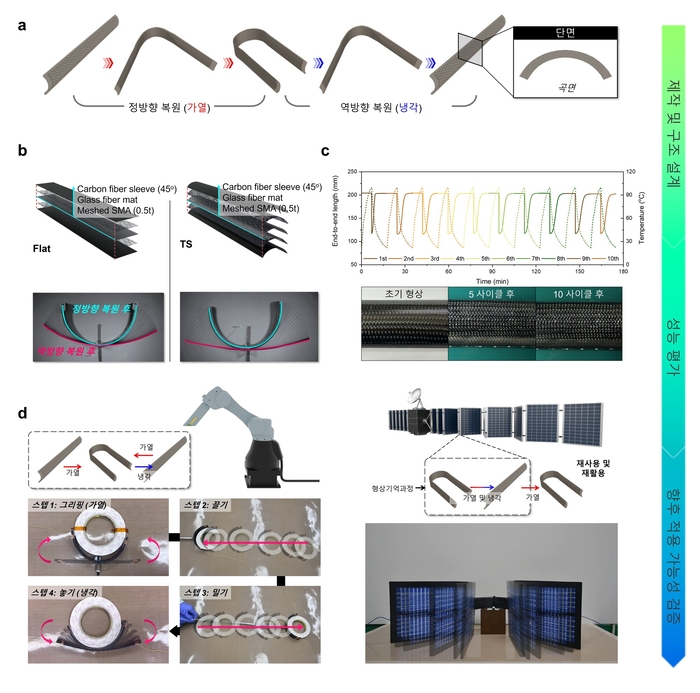
형상기억합금(SMA)과 형상기억고분자(SMP)를 결합해 두 소재 장점을 동시에 활용할 수 있는 하이브리드 복합재 액추에이터를 설계했다. 형상기억합금은 열을 가하면 원래 형태로 돌아가는 금속 소재이며, 형상기억고분자는 열이나 외부 자극에 따라 형태가 변하는 고분자 소재다.
기존 형상기억 소재는 한 번 변형되면 원래 상태로 돌아오지 못하거나(단방향), 회복 속도가 매우 느리다는 한계가 있었다. 또 금속 합금과 고분자 소재는 강도가 달라 반복적으로 사용할 경우 원래 형태로 정확히 복원되지 않는 문제도 있었다.
이를 해결하기 위해 연구팀은 소재·구조를 함께 개선했다. 형상기억고분자 화학 조성을 조절하고 탄소섬유로 보강해 소재를 단단하게 만들었다. 또한 액추에이터에 휘어지는 '테이프 스프링' 형태 구조를 적용했다. 이 구조는 변형 과정에서 에너지를 저장했다가 순간적으로 방출하는 '스냅-스루' 현상을 만들어 움직임 속도·정확도가 높다.
그 결과, 개발된 액추에이터는 열을 가하면 굽혀지고 온도가 내려가면 다시 펴지는 완전한 양방향 구동을 구현했다. 또 기존 기술보다 변형 범위가 크게 늘어나 거의 100%에 가까운 초기 형상 복원률을 보였으며, 원래 형태로 돌아오는 속도도 크게 향상돼 복잡한 제어 없이도 반복적으로 작동할 수 있음을 확인했다.
김성수 교수는 “이번 연구는 소재의 물성적 한계를 독창적인 구조 설계를 통해 극복하고, 형상기억 액추에이터의 성능을 한 단계 끌어올린 결과”라며 “향후 반복적인 그리핑 동작이 필요한 로봇 손이나 우주용 전개 구조물 등 다양한 응용 분야에 적용될 수 있을 것으로 기대한다”고 말했다.
강다정 박사과정이 제 1저자로 참여한 이번 논문은 '어드벤스드 펑셔널 머티리얼스'에 1월 19일자 온라인 게재됐으며, 3월 프론트 커버로 채택됐다.
김영준 기자 kyj85@etnews.com