고속도로 주행 중 앞 차의 갑작스러운 제동으로 추돌 사고가 나면 누구 잘못이 클까? 급제동을 한 앞 차 과실이라고 생각하기 쉽지만 뒤차 과실이 더 크다. 안전거리를 충분히 확보하지 않았기 때문에 사고가 일어난 것으로 본다.
도로교통법 제19조 1항은 ‘모든 차의 운전자는 같은 방향으로 가고 있는 앞 차의 뒤를 따르는 경우에는 앞 차가 갑자기 정지하게 되는 경우 그 앞차와 충돌을 피할 수 있는 필요한 거리를 확보해야 한다’고 규정했다.
안전거리는 주행 속도는 물론이고 도로 상황, 기상 상태 등 외부 요인에 따라 달라진다. 어떤 상황에서도 정지거리가 앞차와 간격보다 길어야 급제동 시 사고를 피할 수 있다.
정지거리는 ‘공주거리’와 ‘제동거리’ 합으로 구성된다. 공주거리는 위험 상황 발생 후 운전자가 대응하는 데까지 걸리는 거리, 제동거리는 운전자가 브레이크를 밟은 후 차가 완전히 정지할 때까지 진행된 거리를 말한다.
정지거리는 주행 속도에 따라 달라진다. 시속 80㎞ 속력에서는 56m, 시속 100㎞ 속력에서는 88m 정도다. 이는 최소 정지거리를 산출한 것이어서 안전거리는 더 넉넉하게 확보해야 한다.
도로교통공단은 애매한 안전거리를 쉽게 계산하기 위해 일반 도로에서는 ‘속도계 수치 〃15’ 만큼, 고속도로에서는 속도계 수치 만큼 안전거리를 확보하라고 권한다. 예컨대 일반도로에서 시속 50㎞로 주행할 때는 35m, 고속도로에서 시속 100㎞로 주행할 때는 100m 안전거리를 확보하라는 얘기다.

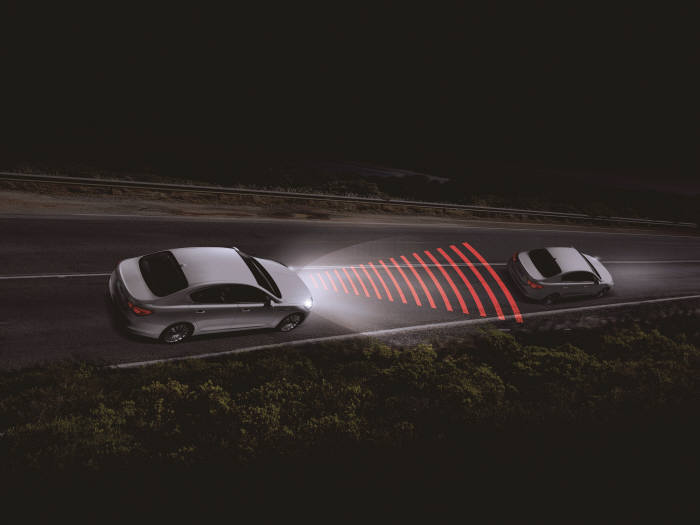
안전거리를 쉽게 확보하게 도와주는 전자장치도 속속 등장하고 있다. 레이더 센서를 사용해 앞차와 적정 거리를 유지하는 어드밴스드스마트크루즈컨트롤(ASCC)이 대표적이다. 전방 카메라로 위험 상황을 감지해 제동까지 수행하는 자동긴급제동장치(AEBS)도 있다.
우리나라에서는 현대모비스가 지난해 ASCC를 처음 양산해 LF 쏘나타에 적용했다. 이 회사는 AEB 개발도 마쳐 양산을 준비하고 있다.
AEB나 ASCC 같은 지능형운전자보조시스템(ADAS) 핵심 부품 중 하나는 차량용 카메라다. 카메라 성능에 따라 인지 성능과 거리가 달라진다. 현대모비스는 2013년 말 국내 최초로 100만 화소 이미지 센서를 적용한 통합영상인식 전방 카메라 개발에 성공했다.
이는 기존 30만 화소 카메라보다 대폭 개선된 성능이다. 30만 화소 카메라로는 전방 70m까지 인식이 가능했지만 100만 화소 카메라를 사용하면 전방 100m 이상을 인식한다. 결국 앞차와의 안전거리 유지 역시 보다 안정적으로 수행할 수 있다. AEB, ASCC 같은 ADAS 기술은 미래 자율주행자동차 요소 기술로도 평가된다.
송준영기자 songjy@etnews.com