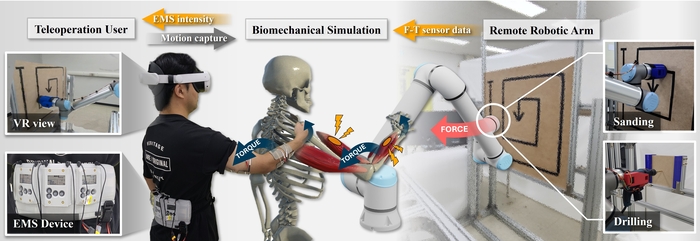
광주과학기술원(GIST·총장 임기철)은 김승준 인공지능(AI)융합학과 교수팀이 미국 매사추세츠 공과대학교(MIT) 연구팀과 공동으로 원격 로봇과 인간을 물리적으로 연결하는 차세대 햅틱 피드백 시스템 '텔리펄스(TelePulse)'를 개발했다고 7일 밝혔다.
이 시스템은 가상현실(VR) 환경에서 사용자가 원격 로봇 팔을 조작할 때, 로봇이 접촉한 물리적 힘을 팔에 정확히 전달한다. 전기 근육 자극(EMS) 기술과 생체 역학 시뮬레이션을 결합했다
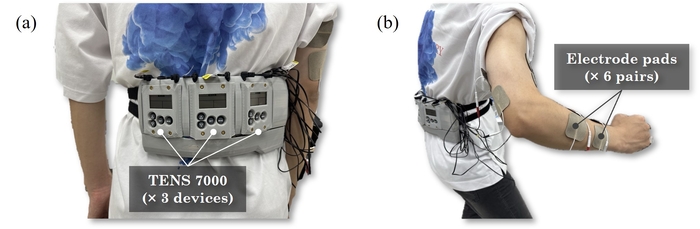
물체를 누르거나 잡을 때 발생하는 미묘한 힘의 차이를 실시간으로 인지할 수 있도록 함으로써 사용자는 단순한 진동이나 표면 자극을 넘어 실제로 근육이 수축하는 수준의 생생한 햅틱 피드백을 경험할 수 있다. EMS는 인체의 생체 액추에이터인 근육에 전기 신호를 전달해 직접 수축을 유도하는 기술로, 별도의 모터나 기계 장치 없이도 직관적이고 강력한 햅틱 피드백을 제공한다.
기존 EMS 기반 햅틱 시스템은 대개 정해진 강도에 비례해 근육을 자극하는 데 머물렀으나 텔리펄스는 사용자의 신체 조건, 자세, 관절 위치 등을 실시간으로 분석해 어떤 근육을 얼마만큼 자극해야 하는지를 정밀하게 계산해 최적화된 피드백을 제공한다.
연구팀은 물리치료 및 재활 연구 분야에서 활용되는 생체 역학 시뮬레이션 툴인 '오픈심(OpenSim)'을 도입해, 사용자 맞춤형 관절 토크 계산과 자극 강도 조절을 실시간으로 수행하도록 해 보다 섬세하고 현실감 있는 햅틱 경험을 구현하는 데 성공했다.
실용성 검증을 위해 텔리펄스를 산업 현장을 가상으로 구현한 드릴링(구멍 뚫기)과 샌딩(연마)과 같은 원격 산업 작업의 시뮬레이션한 실험에 적용했다. 그 결과, 텔리펄스를 사용한 참가자들은 힘 조절 정확도와 작업 일관성 면에서 유의미한 향상을 보였다.
텔리펄스는 복잡한 기계식 햅틱 장치와 달리, 착용이 간편하고 가벼운 구조로 설계돼 높은 이동성과 활용성을 제공한다. 이를 바탕으로 원격 로봇 조작뿐 아니라 원격 수술, 재난 구조, 우주 탐사 등 다양한 고난이도 원격 작업 환경에서도 폭넓게 활용될 수 있을 것으로 기대한다. 인간-로봇 상호작용의 몰입도와 정밀도를 동시에 향상시킬 수 있는 새로운 인터페이스 모델로 주목받고 있다.
김승준 교수는 “텔리펄스는 로봇이 받는 물리적 자극을 인간의 신체로 실시간 전달하는 기술로, 단순한 기계적 조작을 넘어 사람과 로봇이 '감각'을 공유하는 시대를 여는 기술”이라며, “향후 원격 협업, 정밀 작업, 훈련, 재활 등 다양한 분야에서 유용하게 활용될 것”이라고 말했다.
김영준 기자 kyj85@etnews.com