전남대학교는 유석봉 인공지능융합학과 교수팀이 폭설이나 폭우와 같은 악천후 속에서도 강력한 자율주행 기능을 선보이는 3차원(3D) 탐지기술을 개발했다고 12일 밝혔다.
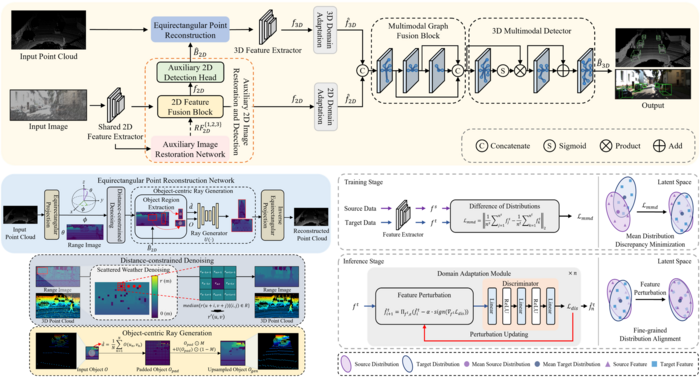
연구팀은 자율주행에서 정밀한 3D 객체 탐지를 위해 라이다와 카메라 데이터를 융합한 새로운 멀티모달 시각지능 기법인 '이퀴디텍트(EquiDetect)'를 선보였다.
현재 멀티모달 시각지능 방법은 날씨가 맑은 이상적인 조건에서는 만족스러운 성능을 보힌다. 하지만 눈이나 비, 안개와 같은 악천후 조건에서는 여전히 취약하다. 날씨 변수는 레이저 신호의 감쇠와 가림 현상으로 인해 '포인트 클라우드(point cloud)' 왜곡을 일으키며, 거리가 멀어질수록 포인트 클라우드는 더욱 희박해져 객체 탐지에 어려움을 준다.
연구팀은 '구형 투영(equirectangular projection)'을 이용한 포인트 복원 네트워크를 제안했다. 이는 레인지맵의 거리 기반 날씨 잡음 제거 기술과 객체 중심의 고밀도 레이 생성 네트워크로 구성돼 있다. 성능을 높이기 위해 특징 맵 변형 주입을 통한 도메인 적응 기법을 도입해 데이터셋 간의 차이를 줄이고 다양한 환경에서의 강건성을 높였다. 멀티모달 날씨 잡음 매칭 기법을 통해 실제와 유사한 학습 데이터를 생성하고, 합성된 포인트 클라우드와 이미지 사이의 날씨 잡음을 정렬해 더욱 현실적인 데이터 학습 환경을 제안했다.
연구팀이 개발한 이퀴디텍트 기술은 자율주행 시 실제 접할 수 있는 다양한 날씨 환경에서도 정확하게 3D 객체의 위치를 실시간 탐지할 수 있다는데 강점이 있다. 다양한 날씨 유형에서 실제 및 시뮬레이션 데이터베이스 실험을 거쳤다. 이 기술이 기존의 객체 탐지 기법들보다 정확도나 연산 시간 단축 등에 있어서 뛰어난 성능을 발휘하는 결과를 확보했다.
이번 연구는 전남대 인공지능융합학과 시각지능미디어연구실 윤재현 석사과정, 정종원 석사과정 학생이 참여했으며, 유석봉 교수가 교신저자로 참여했다. 연구논문은 AI 분야 최고 권위를 가진 'AI에 관한 제39차 연례 AAAI 컨퍼런스'에서 내년 2월 공식적으로 발표할 예정이다.
광주=김한식 기자 hskim@etnews.com