반 세기만에 재개되는 미 항공우주국(NASA; 이하 '나사')의 유인 달 탐사에서 달 표면을 달릴 로버가 세 후보로 좁혀졌다.
나사는 3일(현지시간) 공식 블로그를 통해 아르테미스 프로젝트의 '달 지형 이동체'(Lunar Terrane Vehicle; LTV) 개발업체 최종 후보로 '인튜이티브 머신스', '루나 아웃포스트', '벤추리 아스트로랩' 등 3개사를 선정했다고 밝혔다.
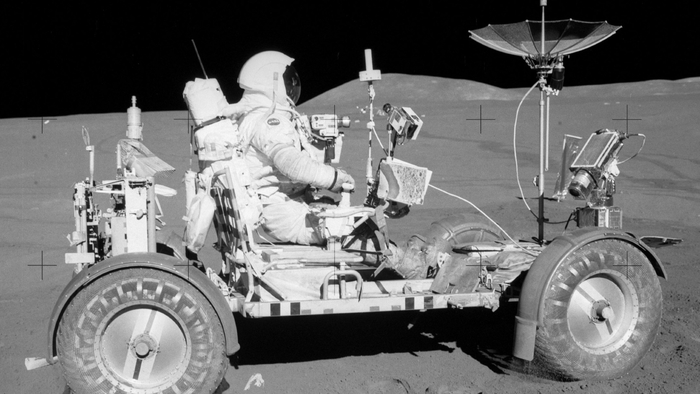
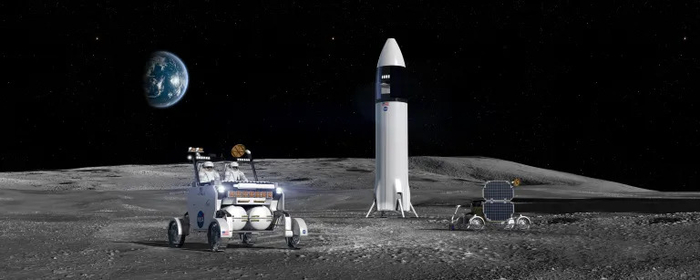
이들 3개 업체는 2030년까지 나사의 달 탐사 프로젝트 '아르테미스' 우주비행사들이 달에서 타고 다닐 LTV를 개발하게 된다. 1971년 아폴로 15호 이후 50년만에 새롭게 선보여지는 달탐사차다.
LTV는 우주비행사가 도보로 갈 수 없는 지형을 탐사할 수 있도록 보조해야한다. 이 때문에 최고 속도 시속 15km, 1회 충전시 20km 주행 외에도 운전자 없이 원격 조작이 가능해야 한다는 조건이 붙었다.


이 외에도 극한의 환경에서도 운행이 가능하고 전력 관리, 최첨단 통신 및 내비게이션 시스템 등 첨단 기술을 갖추고 있어야 한다.
각 업체들은 나사의 타당성 작업 명령에 따라 향후 12개월 동안 로버 콘셉트를 개발하게 된다. 이후 2030년 3월 발사 예정인 아르테미스 5호 발사를 앞두고 주요 시연에서 콘셉트 차량으로 경쟁하게 된다.
나사는 업체들과 단순 LTV 공급 계약이 아닌 LTV 서비스 계약을 체결하게 된다. 프로젝트 규모는 46억 달러(약 6조 2200억원)다. 우승 업체는 달 탐사 로버 제작뿐만 아니라 달의 남극 지역까지 로버를 실어나르고, 달 표면에서 작업 실행도 돕는 포괄적인 역할을 수행할 예정이다.
서희원 기자 shw@etnews.com