GTX-A 수서~동탄 개통으로 대심도 철도 시대가 열리는 가운데, 혹시 모를 재난 상황을 대비할 수 있는 기술이 개발됐다.
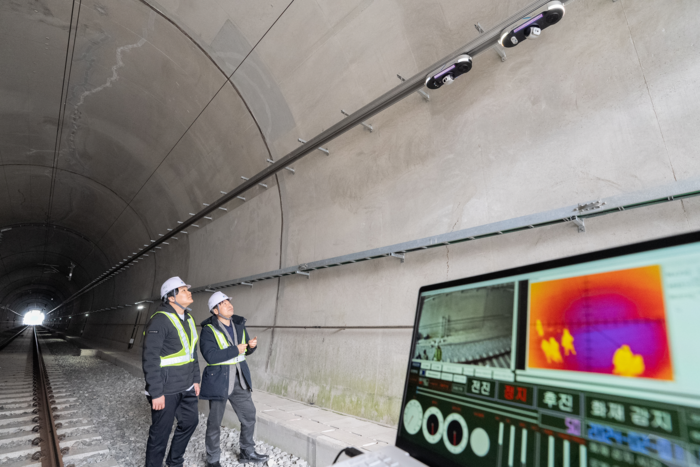
한국철도기술연구원(원장 한석윤)은 터널이나 지하철도 구간에서 발생하는 화재·침수 등 각종 재난 상황에 대응하기 위한 '고속주행 영상 관제 로봇(이하 주행로봇)'을 개발했다고 7일 밝혔다.
주행로봇은 터널 측벽에 부설된 간이 궤도를 고속 주행하며 터널 사고현장을 관리하는 시스템이다.
사고 발생 5분 내 현장에 도착해 승객을 가장 가까운 대피통로로 안내한다. 고해상 광학 및 열화상 카메라로 취득한 사고현장 영상과 음향정보를 철도운영 관제실과 유무선 이중 통신해 사고에 신속 대응한다.
배치 간격은 3㎞, 주행속도는 시속 20㎞/h 이상이다. 스피커와 광선을 이용한 발광 장비로 승객에게 대피 방향을 안내한다.
화재와 같은 고온환경에서도 정상 작동하도록 모든 부품이 내열성을 확보했다.

평상시에는 주행로봇을 지하 터널 선로관리 등 작업 관리, 관제 용도로 활용한다. 온도 및 습도, 미세먼지 농도 측정이 가능해 지하환경도 관리하고, 인공지능(AI) 영상분석 장치를 탑재해 터널에서 발생하는 각종 이상상태 진단에도 사용할 수 있다.
주행로봇 개발은 철도연이 주관한다. 로봇개발에 현성(대표 박병강), 관제시스템에 진원시스템(대표 류제필)이 참여했다. 현재 철도연 오송철도종합시험선로 터널 구간에 설치해 시험 운영 중이다.
연구책임자인 이덕희 철도연 책임연구원은 “개발한 피난안내 주행로봇은 탈착형 로봇 구조로 설치가 매우 간단하고, 내열성이 높다”면서 앞으로 “AI 분석기술에 집중해 더 똑똑한 로봇으로 기술을 완성하겠다”고 말했다.
한석윤 철도연 원장은 “향후 지하철도 등 다양한 지하 활동 공간이 확장될 것으로 예측된다”며 “피난안내 주행로봇이 철도 승객과 시민의 안전을 최우선으로 지키는 스마트 안전기술의 핵심이 되도록 연구개발에 더욱 노력하겠다”고 전했다.
김영준 기자 kyj85@etnews.com