전남대(총장 정성택)는 손형일 융합바이오시스템기계공학과 교수와 주찬영 박사과정생이 필드로봇을 활용한 농업, 국방, 건설, 해양, 우주 등 다양한 응용분야에 적용할 수 있는 새로운 이종군집로봇 제어 아키텍쳐를 제시했다고 5일 밝혔다.
연구팀은 이종군집로봇 제어를 위해 연속 시스템과 이산이벤트 시스템으로 구성된 하이브리드 시스템 접근법을 기반으로 시스템 모델링, 계층 제어기 설계 및 시스템 해석에 대한 체계적인 방법론을 제시하고 타당성을 이론적으로 증명했다.
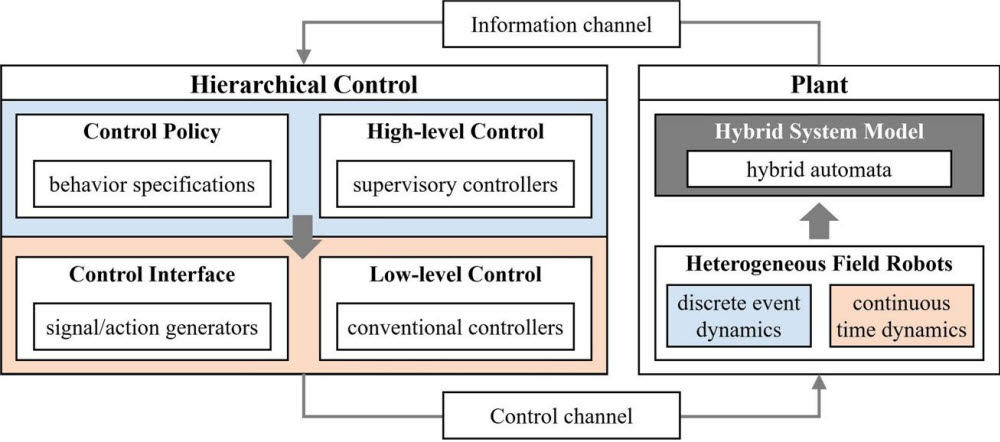

연구팀이 제시한 하이브리드 시스템 기반 계층제어(HSHC) 아키텍쳐는 하이브리드 오토마타로 군집로봇시스템을 모델링하고 라매지-원햄 이론을 이용해 계층제어기를 설계했다. 따라서 각 필드로봇들이 이종이거나 그 숫자가 계속 증가하더라도 쉽게 모델링하고 시스템의 동작을 체계적으로 해석할 수 있어 기존 제어 알고리즘에 비해 확장성이 매우 뛰어나다.
다수 무인지상로봇과 무인항공로봇으로 구성된 이종군집로봇팀이 다양한 농작업을 수행하는 시나리오들에 HSHC 아키텍쳐를 적용한 시뮬레이션과 실험을 통해 효율성을 입증했다.
이번 연구는 한국연구재단 이공학 개인기초연구, BK21 4단계 IT-Bio융합시스템농업교육연구단 등의 지원으로 수행했다. 제어 및 인공지능분야 저명 국제학술지 'IEEE 트렌젝션 온 사이버네틱스', '인포메이션 사이언스'에 각각 게재됐다.
광주=김한식기자 hskim@etnews.com