자동차 브레이크는 바퀴에 힘을 가해 감속하거나 정차하기 위한 장치다. 자동차가 최초로 만들어진 시점부터 지금까지 가장 중요한 안전장치다. 앞으로 자율주행 시대에도 브레이크 역할은 보다 정교해져야 한다.
자동차가 등장하고 1960년대까지 제동장치는 기본적인 '멈춤' 기능을 수행하기 위한 방향으로 개발됐다. 작은 페달 힘으로 큰 제동력을 빠르고 균일하게 만들기 위해 배력과 유압을 활용했다. 이는 'CBS(Conventional Brake System)'로 불렀다.
이후 자동차가 대량으로 보급되며 다양한 도로 조건을 반영한 제동 성능의 기대가 높아졌다. 이에 따라 제동거리 단축, 차량 자세 안정성 확보를 위해 항공용 브레이크 'ABS(전자식 미끄럼 방지장치, Anti-lock Brake System)'가 1960년대 말에 최초로 적용되기 시작했다. 국내에 적용된 것은 1992년에 이르러서다.
ABS 기술은 제동장치 특징이 단순 멈춤 기능에서 '안전성'으로 확대된 것이다. ABS는 바퀴 회전 속도를 측정하는 센서인 WSS(Wheel Speed Sensor)가 필요하며, 이 센서를 이용하면 TCS(Traction Control System)라는 기능도 구현할 수 있다. 미끄러운 노면에서 출발할 때 바퀴 미끄럼도 방지해 안전성을 더욱 높여준다.
이후 ABS에서 한 단계 더 진화한 것이 차량자세제어장치로 불리는 'ESC(Electronic Stability Control)'다. 이름처럼 자세를 측정할 수 있는 센서를 추가로 사용했다. 제동뿐만 아니라 주행 시 엔진 토크까지 제어하며 위급한 상황에서도 자세를 안정적으로 유지할 수 있다.
2000년대 초반부터 자동차 업계는 충돌사고를 미리 예방하는 안전기술을 발표했고, 능동적 안전기술이 대두되며 소형차부터 대형차까지 폭넓게 적용되기 시작했다. 현재 대표적 운전자 보조시스템(ADAS)으로는 스마트 크루즈 컨트롤(SCC)이나 전방충돌방지보조(FCA) 등이 있다.
제동시스템의 관점에서는 레이더나 카메라가 주변 환경을 실시간으로 인지하고, 이를 반영한 제동정보를 ADAS 제어기에 전달하는 '협조제어'가 요구된다. 최근에는 안정성을 넘어 편의성을 강조한 원격스마트주차보조(RSPA) 기능에도 협조제어가 증가하고 있다.
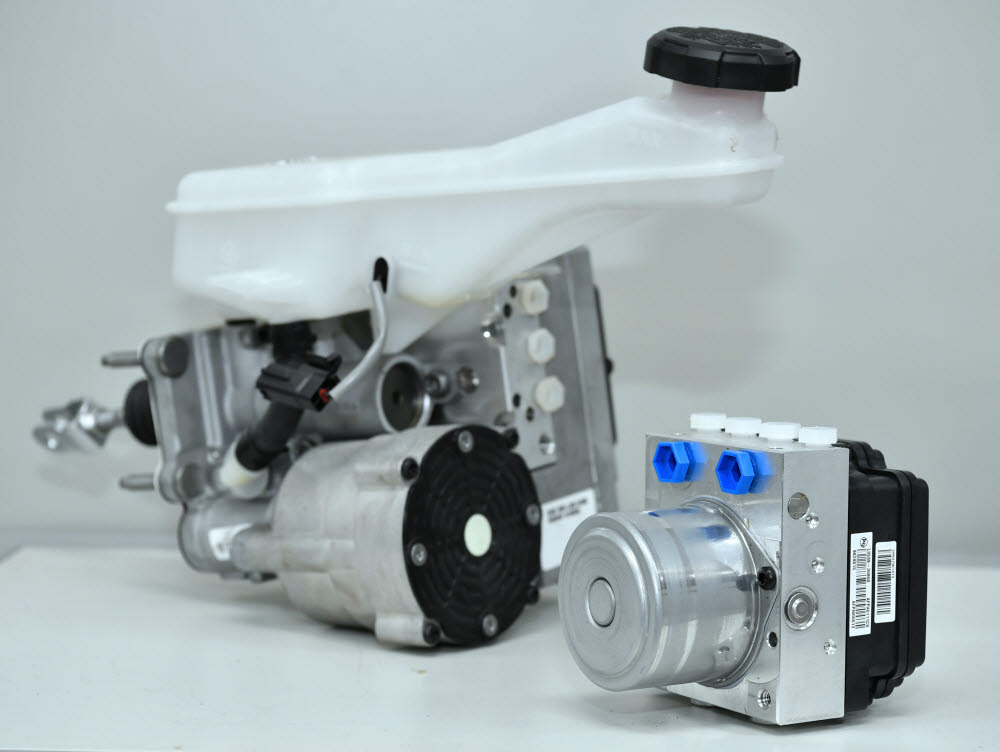
현재 제동시스템은 내연기관에서 전기, 연료전지, 하이브리드 등 전동화 차량으로의 전환이 가속화됨에 따라 회생제동시스템을 활용한 연비향상에 집중하고 있다. 이를 위해서는 구동모터의 부하에 의한 회생제동력과 마찰제동력의 협조제어가 더욱 필요하다. 기존 ESC의 역할과 회생제동이 가능한 시스템을 결합한 '전동식 통합형 회생제동시스템(iMEB)'을 현대모비스가 선제적으로 개발해 양산한 배경이 여기에 있다.
자율주행 관점에서는 올해 7월부터 '레벨3' 단계 수준의 차로유지 기능을 탑재한 차량이 등장할 전망이다. 제한적이지만 자율주행차가 도로에 나타난다는 뜻이다. 이를 위해서는 운전자가 신경을 쓰지 않아도 자율차가 스스로 주행하고 멈춰야 한다.
'자율주행 중 제동시스템이 고장나면 어떻게 멈추어야 하는가?' 이러한 고민에서 출발해 제동시스템의 백업장치 개발이 한창이다. 성능과 경제성, 장착성 등을 고려한 이중화시스템(리던던시)이다.
현대모비스는 지난해 레벨4 이상 완전자율주행에 최적화된 신개념 리던던시 제동시스템을 개발한 바 있다. 이는 2개의 전자식 제동장치와 이를 제어하는 ECU, 소프트웨어 플랫폼으로 구성되며 승용차나 SUV에 즉시 적용 가능한 수준이다.
박태준기자 gaius@etnews.com