네이버랩스의 '공간지능(Spatial Intelligence)' 기술이 비전 분야 세계 최고학회 평가에서 1위를 차지했다.
네이버는 네이버랩스의 공간지능 기술이 '2024 유럽컴퓨터비전학회(ECCV)'의 두 부문에서 1위를 차지했다고 8일 밝혔다.
ECCV는 이미지·영상 등 컴퓨터 비전 분야에 특화된 최신 인공지능(AI) 연구 성과를 발표하고 새로운 기술 화두를 제시하는 세계 최고 권위 학회다. 글로벌 빅테크는 물론 비전 분야 세계 최고 석학이 참석한 가운데 2년 주기로 열린다.
네이버랩스는 이번 ECCV 2024에서 △맵 프리 비주얼 리로컬라이제이션(Map-free visual re-localization) △BOP(Benchmark for 6D Object Pose Estimation) 챌린지 두 부문에 도전해 모두 1위를 차지했다.
'맵 프리 비주얼 리로컬라이제이션' 챌린지는 정밀지도 등이 없는 상황에서도 얼마나 정확하게 측위가 가능한지를 겨룬다. 비주얼 로컬라이제이션(Visual localization)은 일반적으로는 사전에 생성된 3D·HD 지도를 기반으로 측위(Localization)를 수행하는 과정을 거친다. 재난 또는 공사 현장 등 지도를 생성하거나 미리 준비할 수 없는 상황도 있기에 '지도 없이 측위'하는 기술도 점차 중요성이 높아지고 있다.
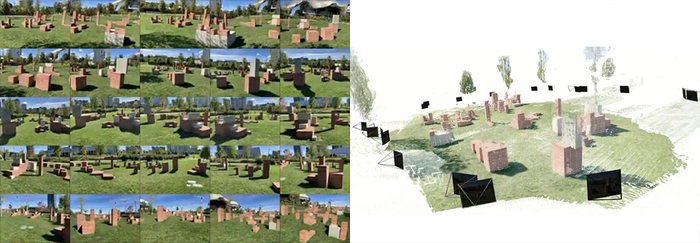
네이버랩스는 해당 챌린지에 이미지를 3D로 재구성하는 AI 기술 도구 '마스터(MASt3R)'를 선보였다. MASt3R는 정밀지도가 없는 상황에서도 충분히 정확한 측위가 가능하다는 점을 인정받아 구글, 애플, 메타 등 12개 참가팀 중 압도적인 1위를 차지했다. MASt3R는 네이버랩스유럽이 개발한 3D 비전 파운데이션 모델(VFM) '크로코(CroCo)'를 기반으로 만든 '더스터(DUSt3R)'의 업그레이드 버전이다.
네이버랩스는 BOP 챌린지에서도 1위를 차지했다. BOP 챌린지에서는 이미지 내에 있는 물체의 3차원 회전과 위치를 얼마나 정확히 추정하는지 평가한다. 네이버랩스가 해당 부문에 제출한 기술 모델은 RGB이미지만으로도 물체 위치를 가장 정확하게 측위하고, 가장 빠르게 처리할 수 있다는 평가를 받았다.
석상옥 네이버랩스 대표는 “AI에 이어 새 미래 변화를 만들어 낼 공간지능은 네이버랩스 출범 이후 로봇과 자율주행 기술을 발전시켜 오며 꾸준히 준비해 온 분야이자 핵심 경쟁력 그 자체”라면서 “로봇, 자율주행, 디지털 트윈은 물론 이를 지원하는 클라우드 인프라, 1784와 같은 핵심 테스트베드, 나아가 중동 등 새 글로벌 이정표로 확장하도록 연구개발(R&D)에 더욱 매진하겠다”고 말했다.
네이버클라우드 역시 이번 ECCV 2024에서 11편의 AI 연구 논문이 게재됐다. 최근 멀티모달 AI 부상으로 주목받는 컴퓨터 비전 분야 기술력을 선보였다. 특히 AI 모델 제작에 필요한 다량의 이미지·텍스트 데이터를 보다 효과적으로 정제해, 양질 학습 데이터셋을 구축할 수 있는 방법을 제안한 연구, 이미지 인식 모델 성능을 향상시키는 방법을 소개한 연구 등을 발표하며 글로벌 AI 연구자의 주목을 받았다.
변상근 기자 sgbyun@etnews.com