국내 특성화대학과 미국 연구팀이 공동으로 재난 현장에서 신속하고 안전하게 인명을 구조할 수 있는 로봇 시각인지를 위한 인공지능(AI) 알고리즘을 개발했다.
광주과학기술원(GIST)은 전해곤 AI대학원 교수가 임성훈 대구경북과학기술원(DGIST) 교수, 권인소 한국과학기술원(KAIST) 교수, 미국 카네기 멜론 대학교 연구팀과 공동으로 재난 현장을 모사한 대규모 데이터 셋을 구축해 현장에서 피해자 위치를 추정할 수 있는 AI 알고리즘를 개발했다고 14일 밝혔다.

연구팀은 가상현실 공간에서 재난 현장을 모사한 대규모 데이터 셋에 실내·외 가상환경에서 지진과 화재 현장을 연출했다. 재난 전·후 상황을 같은 공간과 시점에서 정확히 비교할 수 있도록 영상을 획득한 뒤 3차원(D) 정보와 카메라 위치 정보, 의미론적 영상 분할 정보를 주석화했다. 또 재난 전 상황에서 학습된 공간 정보를 바탕으로 재난이 발생한 상황에서 피해자 위치를 단일 영상만을 이용해 추론할 수 있는 AI 알고리즘도 제안했다.
이번 연구는 재난 현장 데이터 셋 취득이 어렵고 일부 취득한 데이터 셋마저도 AI 알고리즘 학습을 위해 주석화하는 데 턱없이 부족한 상황에서 향후 관련 연구의 활성화에 기여할 것으로 예상된다.
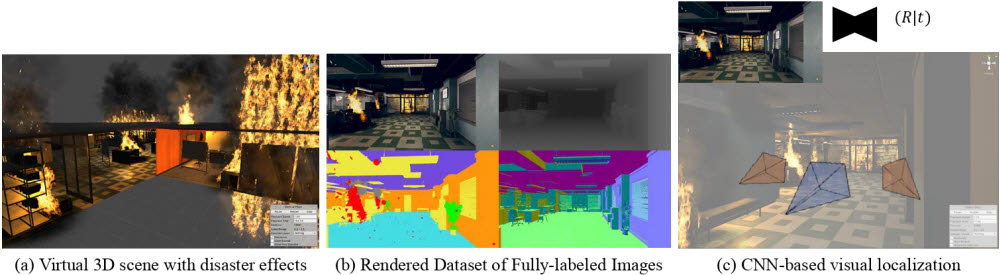
전해곤 교수는 “가상현실 공간 재난 상황을 AI를 활용한 시뮬레이션을 통해 빠르게 대응할 수 있는 재난 구조 로봇의 시각인지를 위한 AI 알고리즘을 제시했다”면서 “향후 다양한 재난 구조 연구를 촉발하는 데 활용되기를 기대한다”고 말했다.
이번 연구는 산업통상자원부와 한국산업기술평가관리원 재난 현장 구조 및 인도적 지원을 위한 차세대 로봇 원천기술 한·미 공동연구 사업의 지원으로 이뤄졌다. 컴퓨터과학-AI 분야 상위 0.3% 논문인 '국제전기전자공학회 패턴분석 및 기계지능'에 최근 온라인으로 게재됐다.
광주=김한식기자 hskim@etnews.com