DGIST, 세계 최초 바늘형 마이크로로봇 개발
기존 약물전달 기능·제어방식 등 획기적 개선

국내 연구팀이 인체 내 원하는 치료 부위에 정확하게 고정되는 바늘형 마이크로로봇을 개발했다. 정밀한 약물 전달로 다양한 정밀의학기술에 적용 가능할 전망이다.
대구경북과학기술원(DGIST·총장 국양)은 최홍수 로봇공학전공 교수 연구팀이 인체 내 치료가 필요한 부위에 정확하고 안정적으로 약물 전달이 가능한 바늘형 마이크로로봇을 개발했다고 13일 밝혔다. 기존 마이크로로봇 약물전달기능과 제어방식을 획기적으로 개선한 것으로 평가받고 있다.
인체 내 조직 치료 가운데 약물치료는 가장 일반적인 치료방법이다. 하지만 약물은 신체 순환기능에 의해서만 전달되기 때문에 목표하는 부위에만 필요한 양의 약물을 정확히 전달하는데 한계가 있다. 이를 극복하기 위한 방식이 몸속을 자유롭게 돌아다니며 목표하는 체내 조직의 정밀 치료가 가능한 마이크로 의료로봇기술이다.
연구팀은 이번에 개발한 마이크로로봇은 3차원 레이저 리소그라피공정을 통한 나노-마이크로 스케일 규모다. 금속박막 증착기술을 이용해 자성물질(Ni)과 생체적합물질(TiO2)을 증착했다. 생체적합물질로 사용된 TiO2는 화학적 방식으로 항암제(PTX) 탑재 능력을 향상시켰다.
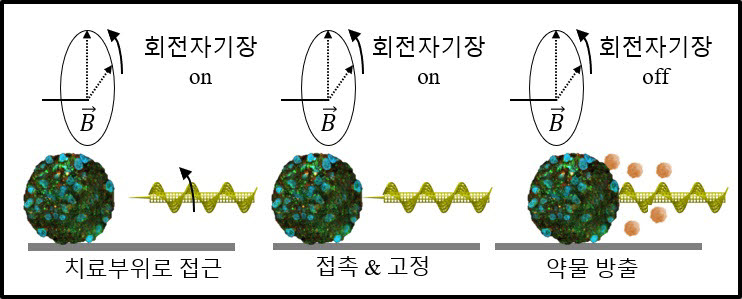
또 체외 약물 테스트 플랫폼에서 실험을 통해 기존 마이크로로봇 제어 기능을 한 차원 개선시켰다. 목표지점으로 정확한 이동이 가능하며 제어 시간도 획기적으로 줄였다. 특정 치료 부위에 로봇을 고정시키기 때문에 외부 지속적인 자기장 에너지 공급이나 제어가 불필요하다.
인체 내부와 같이 특정 유체 흐름이 있는 환경에서 기존보다 유체 저항을 최대 6배 더 견디면서 안정적으로 약물을 전달할 수 있다.
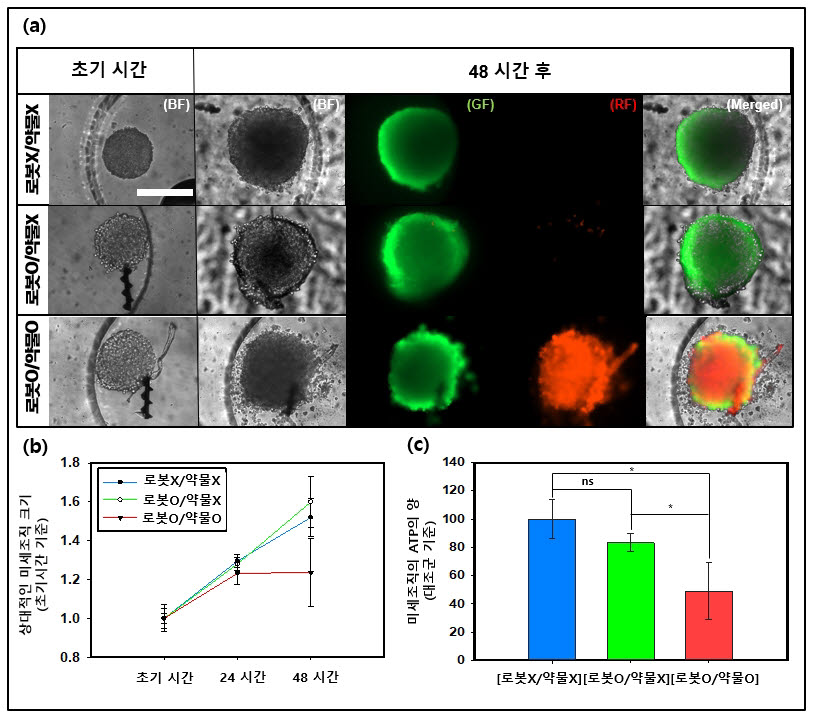
연구팀은 바늘형 마이크로로봇을 체외에서 배양한 암 종양 조직에 적용, 암 종양에 고정되기 전·후 성능 테스트에서 유의미한 결과를 확인했다. 항암제 약물방출을 통한 치료적인 효능도 추가로 증명했다.
최홍수 교수는 “장기적으로 동물실험과 관련 병원 및 기업과 후속 연구를 진행해 실제 의료 현장에서 활용될 수 있는 마이크로로봇 기반 정밀치료 시스템을 개발하겠다”고 말했다.
이번 연구는 최홍수 교수가 교신저자로, DGIST 이승민 박사가 제1저자로 참여했다. 연구 결과는 최근 세계적인 국제과학학술지인 '어드벤스드 헬스케어 머티리얼즈(Advanced Healthcare Materials)' 표지논문으로 게재됐다. 연구는 과학기술정보통신부와 DGIST 지원으로 수행됐다.
대구=정재훈기자 jhoon@etnews.com