메르세데스-벤츠 모회사인 다임러그룹은 2030년까지 완벽한 자율주행 차량 개발을 목표로 하고 있다. 다만 자율주행 기술은 자동차, 센싱, 컴퓨터 등 다양한 기술이 필요하기 때문에 단일 회사가 완성하기 불가능하다. 이에 따라 다임러는 2017년부터 세계 최대 자동차 부품 회사인 '로버트 보쉬'와 협력을 맺고 자율주행 기술 개발에 나섰다.

이들은 단기적으로 내년부터 미국 샌프란시스코에서 미국자동차공학회(SAE) 기준 레벨4 수준 자율주행 셔틀과 택시를 제공한다. 중장기적으로는 2020년 초 레벨3 자율주행차를 시판하고, 2020년 후반까지 레벨4·5 자율주행차 양산이 목표다. 이를 위해 다임러-보쉬는 '센싱-융합-주행'에 이르는 자체 시스템을 개발하고 있다.
다임러-보쉬 카메라 기술은 스테레오 카메라와 모노 카메라 두 가지로 나눠진다. 스테레오 카메라는 200만 화소 카메라 두 개를 장착해 최대 100m까지 심도를 파악할 수 있다. 시야각도 최대 180도가 되기 때문에 사람의 눈처럼 가까운 곳과 먼 곳을 구분해 전방 교통상황을 인지한다. 다임러-보쉬가 스테레오 카메라를 활용해 개발 중인 '휴먼 비전 시스템(Human Vision System)'은 전방에 있는 사물, 교통 표지판, 신호등, 도로 등을 파악한다. 또 전방 사물 거리를 계산해 가까운 곳부터 먼 곳까지 '빨간색-오렌지색-노란색-초록색' 순서로 나타낸다.

다임러-보쉬 모노 카메라는 100만 화소 단일 렌즈로 전방 최대 500m까지 인지한다. 주요 기능은 전방 차량·사람·사물 인식, 차로 인식 등이다. 특히 다임러-보쉬가 공들이는 부분은 보행자와 자전거 인식 기술이다. 모노 카메라는 얼굴 방향을 인식해 보행자, 자전거 진행 방향을 예측한다. 이 기술은 골목길, 교차로 등 신호등이 없는 도로에서 보행자 사고를 예방할 수 있다.
다임러-보쉬는 고급 센싱 기술인 '라이다(Lidar)'도 연구 중이다. 라이다는 고출력 '펄스레이'를 이용해 물체에 반사돼 돌아오는 레이저 빔 시간을 측정해 거리정보를 획득하는 기술이다. 레이더(Radar), 카메라보다 인지 범위나 조건이 뛰어나고, 1초에 수천개 다방향 레이저를 사용하기 때문에 정확도가 뛰어나다. 다임러-보쉬는 현재 라이다만으로 도로와 인도를 구분하는 수준까지 정확도를 높이는 기술을 개발했다.
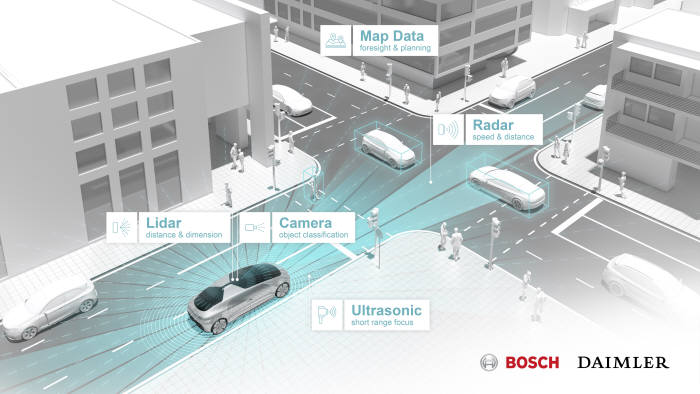
보쉬는 세계 최고 수준 레이더 기술도 보유했다. 메르세데스-벤츠 차량에 적용하는 어댑티브 크루즈 컨트롤(ACC), 비상 브레이크(AEB), 사각지대 감지시스템(BSA) 등에 이미 적용했다. 레이더의 가장 큰 장점은 눈, 비, 안개 등 날씨 영향을 적게 받는 것이다. 또 센싱 범위가 넓기 때문에 사람 눈으로 확인할 수 없는 정보를 파악할 수 있다.
다임러-보쉬는 초고정밀 GPS도 연구한다. 기존 고정밀 지도에 사용하는 GPS는 오차범위가 30㎝ 수준이다. 하지만 다임러-보쉬는 오차범위를 수㎝ 수준으로 대폭 줄여 센싱 장비 없이도 지도 경로를 따라 자율주행이 가능한 차량을 개발 중이다. 현재 이멘딩겐 다임러 기술시험센터에서 최고 시속 80㎞ 속도에서도 오차 범위를 벗어나지 않는 주행 기술을 연구한다.

다임러-보쉬는 이와 같은 기술력을 실제 주행에 완벽히 녹여내기 위해 소프트웨어(SW) 개발에도 열을 올린다. '센서 퓨전(Sensor Fusion)'은 각 센서가 인식한 정보를 하나로 결합, 자율주행이 가능하도록 하는 기술이다. 여기에 사용하는 인공지능(AI) 기술이 '완전한 복잡형 인공신경망(fully convolutional neural network)'이다. 이는 AI가 사람 뇌처럼 각 센싱 정보를 융합해 차량 주행 알고리즘을 만든다.
센서 퓨전은 또 라이다, 레이더, 카메라, GPS 등 각 기술 장단점을 서로 보완한다. 가령 레이더는 판독한 정보를 시각화하기 어렵고, 라이다는 눈, 비 등 날씨 영향을 많이 받는다. 카메라는 전방 시야가 확보되지 않으면 무용지물이다. 센서 퓨전은 각 센서 장점을 활용해 이와 같은 단점을 보완해 완벽한 주행을 제공한다. 또 자율주행차가 해킹 당하거나 5세대(5G) 이동통신 등 통신망이 차단된 상황에서도 안전한 주행이 가능하도록 한다.
이멘딩겐(독일)=류종은 자동차/항공 전문기자 rje312@etnews.com