드론이 알아서 장애물을 피한다. 중국 DJI가 확보한 드론 제어 특허 기술을 통해서다.
IP노믹스가 발간한 `글로벌 드론 특허 집중분석` 보고서에 따르면 DJI가 2014년 미국 특허상표청(USPTO)에 출원한 `센서 데이터를 바탕으로 충돌방지 등 무인기가 비행속도를 자율적으로 결정하는 시스템과 방법(Velocity Control for an Unmanned Aerial Vehicle)` 특허(공개번호:US 20160216710)는 드론이 속도를 제어해 장애물과 충돌을 피한다. 충돌 회피는 지금껏 사용자 판단에 의존했지만 해당 특허로 초보자도 무인기를 안전하게 조작할 수 있게 됐다.
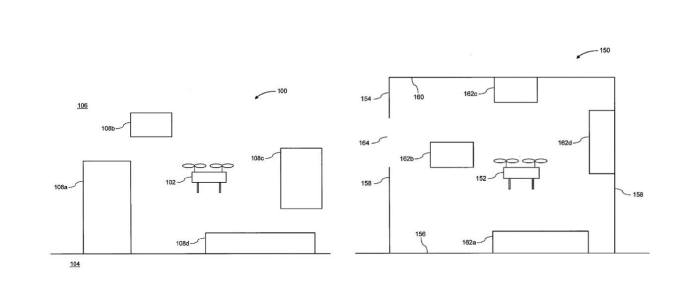
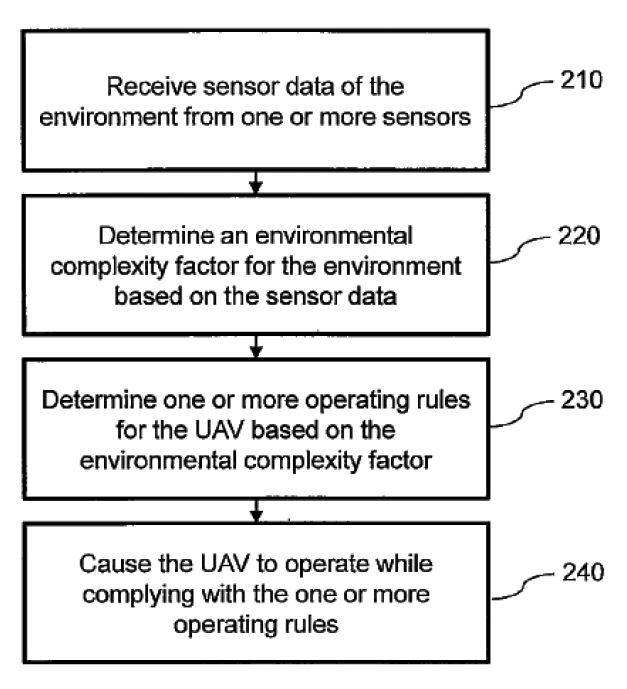
드론은 자율비행모드 시, 환경에 적합한 비행 규칙을 스스로 세워 정해진 경로를 따라 비행한다. 비행 규칙은 드론의 △속도 △가속도 △위치 △비행 방향 등을 설정하는 것이다.
비행 규칙 설정을 위해 드론에 탑재된 카메라, 라이다(LiDAR), 초음파 센서 등 각종 센서가 주위 장애물 밀집 정도를 파악한다. 드론은 수집된 데이터를 바탕으로 최적의 비행 규칙을 수립해 충돌 가능성을 최소화한다. 예를 들어 장애물 밀집도가 높은 지역에서는 저속 비행을 하고 장애물 밀집도가 낮은 지역에서는 제한 속도를 높이는 식이다.
속도 규칙은 △저속 비행 모드 △중속 비행 모드 △고속 비행 모드 등이 있다. 드론은 비행 중 갑자기 장애물을 만나면 자동충돌방지 기능이 작동해 이동을 멈추고 일정 고도를 유지한 제자리 비행(Hovering)을 한다.
드론은 카메라 두 대에서 시점 차이로 보이지 않는 영역 변위값을 정확히 인식하고 깊이 정보를 포함한 변위 지도(Disparity Map)를 생성한다. 드론은 변위 지도를 읽어 비행에 반영한다.
IP노믹스 보고서 `글로벌 드론 특허 집중분석`은 글로벌 핵심 특허 130건을 △드론 자체 기능 향상과 플랫폼 △드론 활용 서비스 △드론 활용 도시 인프라·프라이버시·UI/UX·인증확인 총 3개 분야로 나눴다.
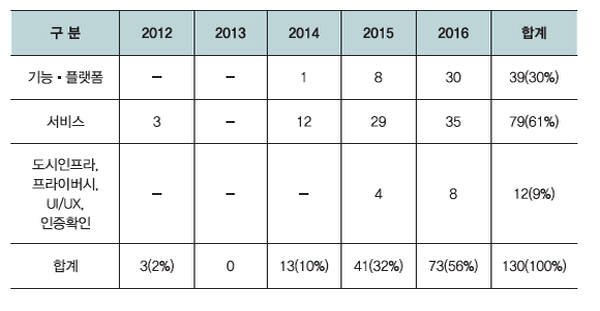
4년간 드론 관련 특허 중 실현 가능성이 높은 특허를 엄선해 집중 분석했다. 글로벌 핵심 드론 특허에 대한 상세한 분석을 통해 앞으로 집중해야 할 드론 기술을 짚어준다.
※상세 내용은 IP노믹스 홈페이지(www.ipnomics.co.kr )에서 확인할 수 있습니다.
나유권 IP노믹스 기자 ykna@etnews.com