20~30km 얼음층 뚫고 해저 외계생명체 시료 채취
목성의 달 유로파 탐사에 고출력 레이저광선포를 장착한 로봇이 보내진다. 유로파를 뒤덮고 있는 두꺼운 얼음층 돌파 및 그 아래 바다에서의 시료 채취용이다.
데일리메일은 최근 미국의 스톤에어로스페이스가 유로파로 보내질 탐사용 로봇 시제품을 가지고 알래스카 마타누스카 빙하에서 얼음뚫는 테스트계획을 진행중이라고 보도했다. 빌 스톤 대표는 올 여름 알래스카 마타누스카빙하로 자사의 전문가와 과학자 팀을 이끌고 가서 전세계에서 가장 앞선 크리오봇을 계속해서 테스트하게 된다.
스톤에어로스페이스는 미항공우주국(NASA,나사)의 지원아래 유로파 탐사 지원을 위한 고출력 레이저광선포로 무장한 크리오봇(Crybot) 테스트를 진행한다.
나사는 2016회계년도 유파탐사선인 유로파 클리퍼(Europa Clipper)컨셉 개발 예산으로 3천만달러(약 330억원)를 배정받아 놓고 있다.
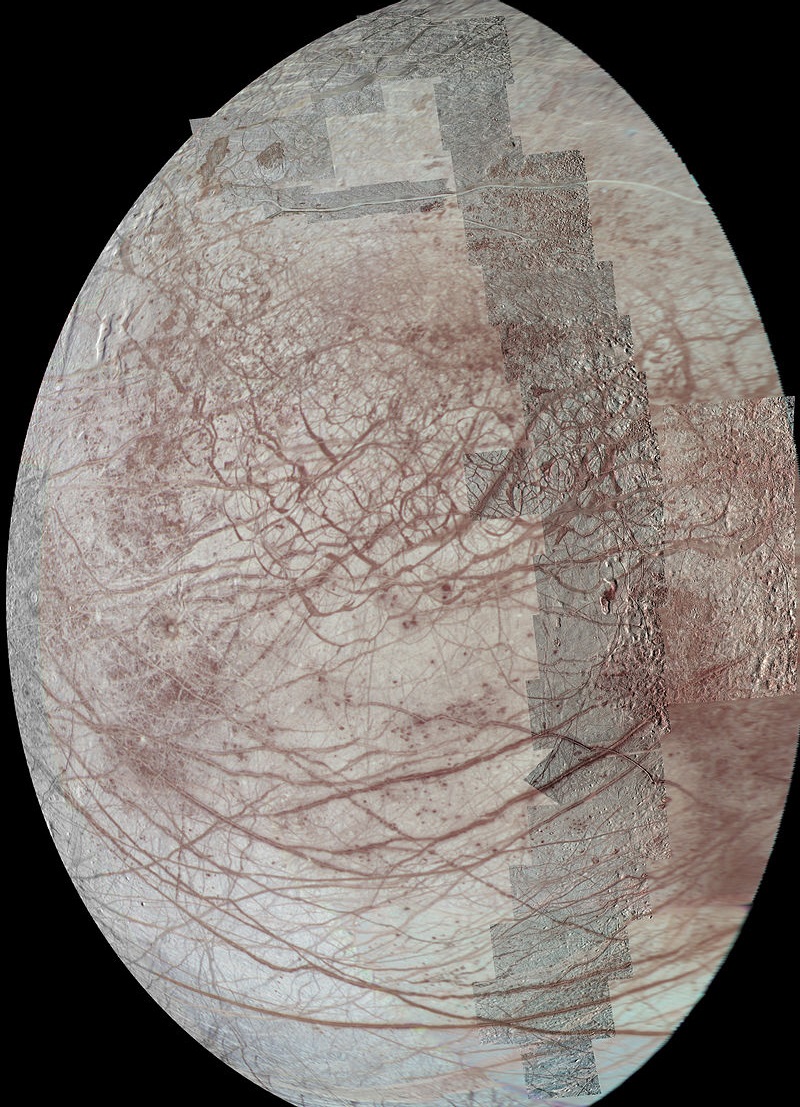
■유로파의 두꺼운 얼음을 뚫어야 한다
루이스 프록터 존스홉킨스대 응용물리학연구소(APL)의 유로파클리퍼 미션 예비프로젝트담당 부과학자는 “유로파가 생명체가 거주할 만한 곳이라고 가정할 때 다음 번 임무는 이곳에 착륙해 얼음 밑까지 갈 수 있는 능력을 확보하는 일이 될 것”이라고 말했다.
그녀는 유로파의 얼음밑을 뚫고 도달하는 모험은 대담한 도전이라고 말했다. 우선, 어떤 크리오봇이라도 유로파의 20~30km(최대 96km)에 해당하는 두꺼운 얼음에 터널을 파야 한다. 가장 얇은 쪽 얼음이라고 해도 두께가 수 km에 달한다.
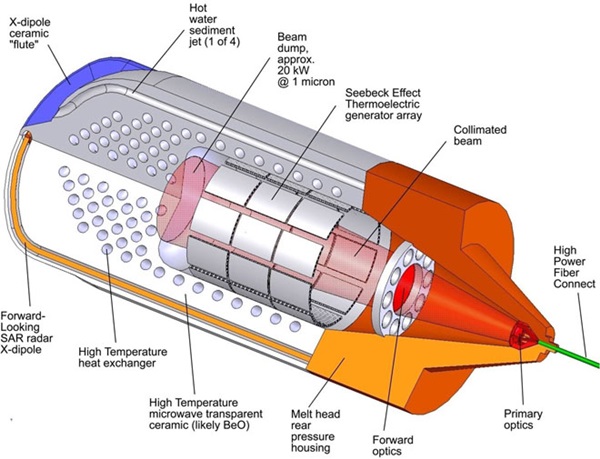
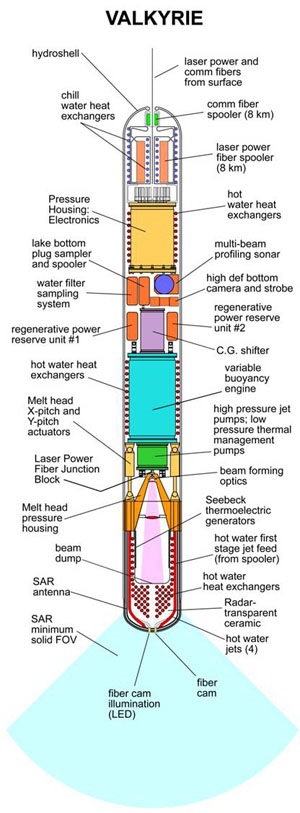
이 크리오봇을 사용한 유로파 얼음돌파용 로봇시험 프로젝트는 `심해 자율레이저기반 킬로와트급 요요로봇 얼음탐사선`을 의미하는 발키리(VALKYRIE)로 명명됐으며 나사의 행성탐사 우주생물 과학기술프로그램(ASTEP)의 자금지원을 받는다.
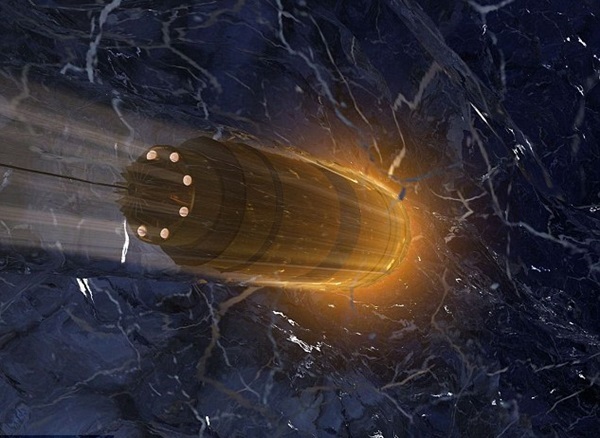
발키리는 레이저와 광섬유를 사용해 진행 방향의 얼음을 녹이게 돼 있다. 레이저에너지는 물에 열을 가해 자신의 앞에 있는 얼음을 녹인다.
지난 해 발키리는 마타누스카빙하를 31미터까지 뚫고 내려간 적이 있으며 이번 테스트에서는 더 깊이 얼음을 파고 들어갈 계획이다.

■유연한 오징어로봇,뱀장어로봇도 보낸다
나사는 유로파 탐사 관련 프로젝트를 통해 많은 시도를 해 왔다. 지난 달 말에는 유로파에서 외계생명체를 찾을 만한 다양한 탐사로봇 컨셉을 공개했다.
유로파에서의 외계생명체 탐사임무를 위해 선택된 제안 가운데 하나는 전통적 방식에서는 찾아볼 수 없는 이른 바 부드러운 탐사로봇 기술을 사용하고 있다는 점이다.
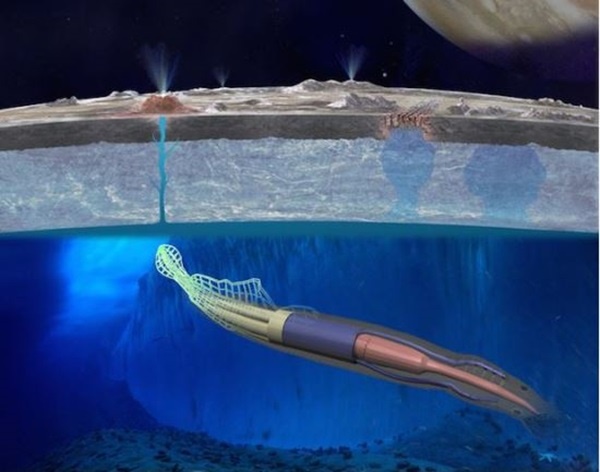
대표적인 것이 오징어로봇 컨셉모델이다.
이 로봇은 유로파 탐사를 위한 나사첨단혁신컨셉(NIAC) 1단계용으로 제안된 15개 모델 가운데 하나다. 나사는 앞서가는 개척적인 기술을 통해 공상과학 속의 이야기를 과학적 사실로 만들기 위해 NIAC프로그램을 수행하고 있다.
나사의 이 부드러운 오징어 로봇은 유로파의 얼음 덮인 지표면 아래 바다를 탐사하기 위해 개발되고 있는데 등에는 유로파의 변화하는 자장으로부터 전력을 뽑아낼 짧은 안테나가 장착돼 있다. .
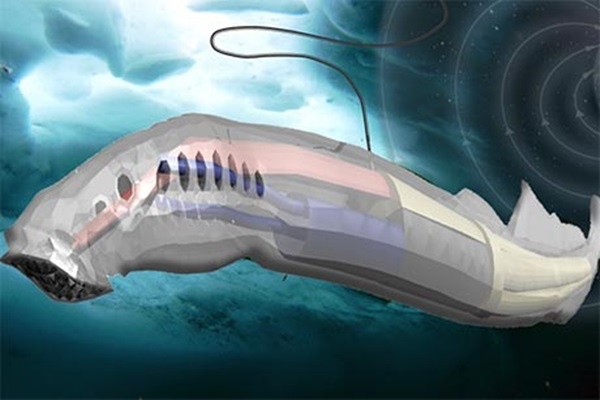
뱀장어 모습의 탐사로봇도 공개됐다. 이 로봇역시 전통적인 로봇 전원시스템과는 달리 등에 짧은 안테나를 통해 유로파의 자기장 변화로부터 전력을 뽑아낸다.
나사가 이처럼 다양한 로봇을 유로파에 보내려는 이유는 유로파의 육지와 바다를 동시에 탐사할 수 있도록 하기 위해서다.
이 컨셉을 제안한 메이슨 펙 코넬대교수는 “부드러운 로봇방식을 제안한 것은 태양광이나 원자력 전원로봇으로는 유로파 같은 환경에서 인간에 앞서 과학적탐사 및 조사 임무를 수행할 수 없기 때문"이라고 말했다.
그녀는 "오징어탐사로봇은 촉수를 가진 오징어와 닮은 구조다. 이는 유로파의 변화하는 자기장으로부터 전력을 뽑아내 주는 전기적 역동성을 가진 끈 역할을 하며, 생체방식에 의해 앞으로 나아갈 수도 있게 해 준다"고 설명했다.
이 로봇들은 유로파의 주변환경에서 전기에너지를 수집, 물을 전기분해해 이 탐사로봇의 모든 보조시스템을 가동한다. 전기분해 결과 수소와 산소가스의 혼합물을 만들어 내게 되는데 이들은 로봇 내부에 저장된다. 이 가스에 점화하면 내부의 연소실로 확산돼 로봇의 모습을 변화시키며 탐사로봇은 이런 방식을 통해 유로파의 바다는 물론 지표면에서도 나아갈 수 있게 된다.
부드러운 로봇들은 이런 방식으로 유로파의 외계 생명체 존재 가능성 탐사임무를 수행하게 된다.
유로파는 대략 지구의 달과 같은 크기를 가진 천체로서 액체가 가득찬 초콜릿같으며 지표면을 덮고 있는 얼음 아래에는 최소 깊이만도 100km에 이르는 대양을 가지고 있는 것으로 밝혀졌다.
■두개의 글라이더를 사용한 모습의 비행선도 추진
또다른 유로파 탐사용 로봇으로 제안된 것은 두 개의 글라이더를 사용한 모습을 가진 비행선으로서 자체 추진력없이 항해한다. 이 비행선은 서로 다른 높이의 초강력 케이블로 연결돼 있다. 이 비행선 상층부는 성층권 하부의 약 1.8km 상공에서 발생하는 연날릴 때 사용하는 것과 같은 기류(wind shear)를 이용해 공기역학적인 추력을 제공받게 된다. 반면 이 비행선의 하층부는 상승기류를 사용해 기체가 내려오는 것을 막아주는 원리를 이용하게 된다.
만일 이 방식이 성공한다면 이 대기권 위성은 수년 간 유로파 성층권에 머물면서 나사의 지구과학임무를 수행하게 된다. 이는 궤도위성망 구축비용의 극히 일부에 해당하는 비용으로 유로파를 모니터링을 할 수 있게 해 줄 것으로 기대를 모으고 있다.
이외에도 비용이 많이 들지 않는 무한궤도 방식로봇, 또는 뛰거나 축구공처럼 튀는 방식의 귀여운 로봇들이 물과 다른 원소로 구성된 유로파의 표면을 탐사하게 될 것이다. 또한 다양한 로봇들이 유로파의 고해상도 지도제작에 사용될 전망이다.
물론 다양한 기술범주를 가진 이 모든 컨셉은 개발초기 단계에 있다.
한편 나사는 지난 2002년 섭씨 90도까지 달아오르는 구리코를 가진 크리오봇으로 북극의 빙하층을 22.5미터 정도 관통하는 실험에 성공한 바 있다. 이 130만달러짜리 로봇은 지난 2001년 10월 노르웨이 북쪽 북극해에 있는 스피츠베르겐 섬의 빙하층에 구멍을 내는 데에도 성공했다.
■크리오봇은?
1960년대에 독일 물리학자 칼 필베르트가 발명한 것이 처음이다.
유로파에 보낼 크리오봇을 실험중인 미국 스톤 에어로스페이스의 크리오봇 발명가인 빌 스톤은 2002년 북극에서 처음으로 빙하를 뚫는 실험을 했다.

유로파탐사를 원하는 과학자들앞에 가로막혀 있는 최대 난제는두꺼운 얼음지표층을 뚫기 위해 엄청난 에너지가 필요하다는 점이다.
태양광은 지표면 아래에서 작동시킬 수 없어 이 방식으로 충전하는 배터리를 오래 가동시킬 수 없는 약점을 가지고 있다. 또한 소규모의 핵원자로는 충분한 전력을 제공할 수 있을지 모르지만 현실적으로 유로파 해저 탐사를 위해 뚫어봐야 하는 범위가 너무 넓다. 나사는 원자로방식의 드릴기기를 남극에서 시험하고자 했지만 남극국제협약에 따른 제약으로 인해 테스트할 수 없었다.
대안으로 떠오른 것은 1.8미터 길이에 지름 250cm짜리 실린터형의 발키리(VALKYRIE)다.
스톤에어로스페이스사의 크리오봇은 발전소와 고에너지 레이저장치를 지표면 위에다 둔다. 로봇이 얼음을 뚫고 지나감에 따라 연결된 수km의 광섬유케이블이 뒤따라가며 레이저빔을 쏘게 된다. 크리오봇은 유로파 바닷물 샘플을 채취한 후 다시 얼음을 녹여가며 표면쪽으로 되돌아오게 된다.
와이어드에 따르면 빌 스톤의 에어로스페이스사는 수년간 탐사로봇을 설계하고 만들어 왔다. 그의 첫 번째 크리오봇은 뎁스X(DEPTHX)로 불리며 지난 2003~2006년 사이에 멕시코만의 해저샘에서 인간의 제어없이 테스트된 적이 있다. 당시 해저 300미터 이하로 내려가 이전까지 알려지지 않았던 미생물 종을 찾아내는 데에도 성공했다. 또 3D지도를 만들었으며 광물질이 든 해저수 샘플도 채취했다.
그의 팀은 이 당시 이미 로봇과 교신하기 위해 인간의 머리카락보다도 얇은 광섬유를 사용하고 있었다. 과학자들은 이 광섬유를 이용해 멀리서도 로봇의 복잡한 임무수행과정을 살펴보는데 엄청나게 유용하다는 것을 알아냈다. 스톤은 이를 감시속의 자율(supervised autonomy)로 부르고 있다.
빌 스톤은 케이블을 통해 움직이는 빛이 작고 매우 미약한 레이저에 의해 만들어진다는 데 착안, 레이저출력을 킬로와트급으로 높여 얼음으로 덮인 유로파 지표면 돌파용 탐사로봇을 만들기로 했다.
기존의 레이저는 크리스털로 빛을 증폭했지만 광섬유를 사용하는 기술은 광섬유 자체에서 빛을 증폭하는 새로운 수준의 레이저에 의존한다. 이는 다른 어느 곳에서도 얻을 수 없는 수준의 에너지다.
빌 스톤은 자신의 기술이 유로파에 갈 수 있는지와 별개로 또다른 우주탐사는 물론 지구에서도 사용될 수도 있다고 말했다.
그는 물리학의 법칙과 테스트 데이터를 기반으로 할 때 자신의 크리오봇이 96km이상 두께의 얼음으로 된 유로파 착륙지에 훨씬더 강력한 레이저출력을 가진 로봇을 보낼 수 있다는 사실을 보여준다고 말하고 있다.
이재구 전자신문인터넷 국제과학전문기자 jklee@etnews.com