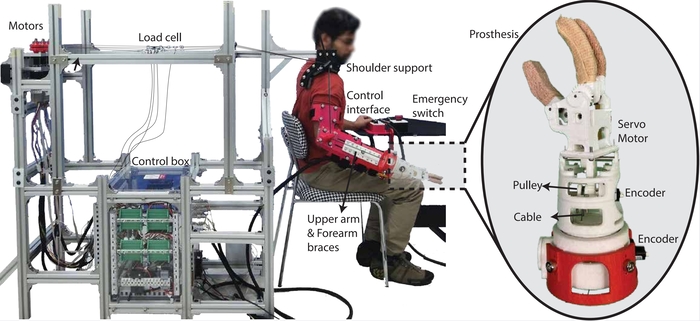
광주과학기술원(GIST·총장 임기철)은 강지연 AI융합학과 교수가 이끈 한-미 공동연구팀이 어깨부터 손까지의 움직임을 고려해 개인에게 맞는 상지(어깨부터 손까지를 포함한 팔 전체) 의수 설계를 지원하는 로봇 기반 의수 체험 시스템 'I-PEDLE'을 개발했다고 24일 밝혔다.
이 시스템은 여러 방향으로 자유롭게 움직일 수 있는 구조를 갖춘 것이 특징이다. 다양한 의수의 움직임을 로봇으로 구현해 사용자가 직접 체험할 수 있도록 하고 그 결과 데이터를 바탕으로 개인에게 적합한 맞춤형 의수 구성을 제안한다.
상지가 절단된 환자를 위한 고기능 의수 기술은 지속적으로 발전하고 있지만, 무게 부담과 복잡한 제어 방식, 높은 비용 등의 한계로 실제 사용자 만족도는 여전히 낮은 편이다. 특히 많은 상용 의수는 능동적인 손목 기능이 부족해 이를 보완하기 위해 어깨나 팔꿈치를 과도하게 사용하는 움직임이 나타날 수 있으며, 이러한 동작이 반복될 경우 장기적으로 근골격계 통증으로 이어질 가능성이 있다는 지적이 제기돼 왔다.

이러한 문제를 개선하기 위해 손목 움직임을 정밀하게 구현한 여러 방향으로 움직이는 로봇 의수가 개발되고 있으나, 높은 가격에도 불구하고 사용자 맞춤 설계를 위한 명확한 기준과 객관적인 평가 체계는 아직 마련되지 않았다.
연구팀은 케이블 구동 방식을 적용해 가벼우면서 세 방향으로 움직이는 손목 기능을 구현한 로봇 기반 인공 팔 체험 시스템(I-PEDLE)을 개발했다. 건강한 참가자를 대상으로 일상 동작을 수행하게 한 결과, 특정 손목 움직임 조합은 의수를 사용하기 위해 어깨를 과도하게 돌리거나 들어 올리는 등 다른 관절을 불필요하게 더 많이 사용하는 동작을 줄이는 효과가 확인됐다.
또한 다양한 손목 기능 조건을 동일한 환경에서 구현하고, 동작 수행 과정에서 나타나는 관절 움직임과 부족한 기능을 대신하기 위해 다른 관절을 더 많이 사용하는 동작을 센서 데이터로 수집해 분석하는 방식으로 성능을 검증했다. 동작의 변화에 따라 달라지는 어깨와 팔꿈치 움직임을 정량적으로 평가할 수 있어, 사용자 경험에 의존하던 의수 선택 과정이 데이터 기반의 합리인 의사결정 방식으로 전환될 것으로 기대한다.
향후 실제 상지 절단 환자를 대상으로 시스템을 검증하고, 사용자 반응을 실시간으로 반영해 최적 설계를 찾아가는 방식을 적용한 맞춤형 의수 설계 알고리즘 개발로 연구를 확장할 예정이다.
김영준 기자 kyj85@etnews.com