초저전력으로 구동되며 무게 대비 34배의 큰 힘을 내는 인공근육 유체 스위치가 개발됐다.
한국과학기술원(KAIST·총장 이광형)은 오일권 기계공학과 교수팀이 이같은 성과를 냈다고 4일 밝혔다.
유체 스위치는 특정 방향으로 유체가 흐르게 해 다양한 움직임을 유발하는 장치다.
이는 인공근육 기반이다. 인공근육은 모터에 비해 유연하고 자연스러운 움직임을 제공해 소프트 로봇이나 의료기기, 웨어러블 장치 등에 사용되는 기본 소자 중 하나다.
전기, 공기 압력, 온도 변화와 같은 외부 자극에 반응해 움직임을 만들어 내는데, 이 움직임을 얼마나 정교하게 제어하는지가 중요하다. 기존 모터 기반 스위치는 딱딱하고 부피가 커 제한된 공간 내 사용이 어려웠다.
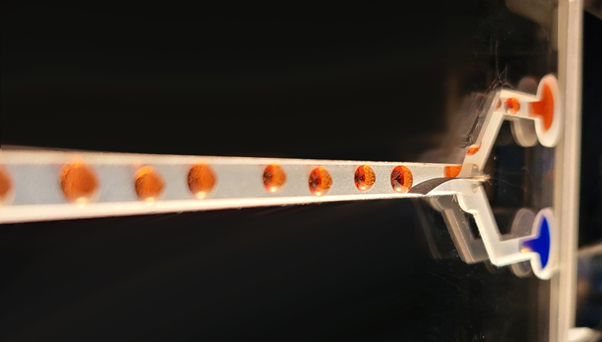
연구팀은 좁은 관 속에서도 큰 힘을 내며 유체 흐름을 제어할 수 있는 이온성 고분자 인공근육을 개발, 이를 소프트 유체 스위치로 활용했다.
연구팀이 개발한 이온성 고분자 인공근육은 금속 전극과 이온성 고분자로 구성돼, 전기에 반응해 힘과 움직임을 발생시킨다.
초저전력(~0.01V) 구동하면서 무게 대비 큰 힘을 낼 수 있도록, 인공근육 전극 표면에 유기 분자를 결합해 만든 다공성 공유결합성 유기 골격구조체 (pS-COF)를 활용했다.
그 결과, 머리카락 정도로 얇은 인공근육이 가벼운 무게 (10㎎) 대비 34배 이상 큰 힘을 내며 부드러운 움직임을 보였다. 낮은 전력으로 유체 흐름 방향을 정교하게 제어하는데 성공했다.
오일권 교수는 “초저전력으로 작동하는 전기화학적 연성 유체 스위치는 유체 제어를 기반으로 하는 소프트 로봇, 소프트 일렉트로닉스, 미세유체공학 분야에서 많은 가능성을 열어줄 수 있다”며, “스마트 섬유에서 생체 의료 기기에 이르기까지, 이 기술은 우리 일상에서 초소형 전자 시스템에 쉽게 적용함으로써 다양한 산업현장에서 즉시 활용할 수 있는 잠재력을 지니고 있다”고 말했다.
KAIST 기계공학과 연구 교수인 만마싸 마하토 박사가 제1 저자로 참여한 이번 연구 결과는 2023년 12월 13일 국제 학술지 '사이언스 어드밴스드'에 게재됐다.
이번 연구는 한국연구재단의 리더과학자지원사업(창의연구단)과 미래융합파이어니어 사업을 지원받아 수행됐다.
김영준 기자 kyj85@etnews.com