







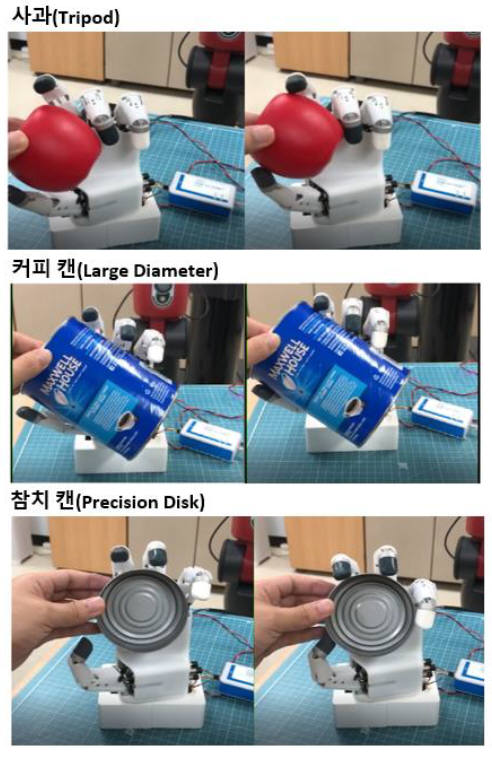
여러 형상의 물체를 자유롭게 집거나 도구를 사용하는 등 마치 사람 손처럼 작동하는 인간형 로봇 손이 국내 개발됐다. 로봇 손은 무게 대비 쥐는 힘이 세계 최고 수준이며 다양한 로봇 팔에 장착 가능하다. 로봇 활용 산업 분야 발전에 핵심 역할을 할 전망이다.
한국기계연구원(원장 박천홍)은 도현민 로봇메카트로닉스연구실 박사팀이 사람 손과 같은 방식으로 물체를 조작하는 로봇 손 개발에 성공했다고 22일 밝혔다.
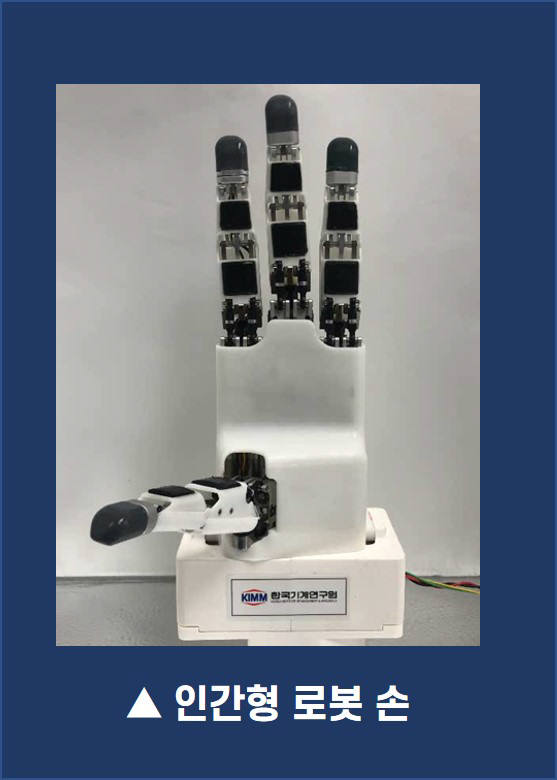
로봇 손은 4개 손가락과 16개 관절로 이뤄졌다. 12개 모터를 사용, 각 손가락이 독립적으로 움직인다. 핵심은 모터를 직경 8㎜ 수준으로 소형화해 내장했다는 점이다. 기존 로봇 손 모터는 크고 무거워 내장이 불가능했다. 반면에 새로운 모터를 쓴 로봇 손은 모터를 소형화 하면서 구동부를 손바닥 내부에 장착할 수 있다. 덕분에 모듈화를 이뤄, 로봇 팔에 장착하기 쉬워졌다. 기존 로봇 손은 모터가 외부에 있어 로봇 팔을 적용할 때 별도 구조 변경이 필요했다.
새로운 로봇 손은 무게 대비 쥐는 힘도 매우 크다. 모터 소형화로 손 무게를 1㎏이하로 줄였지만 낼 수 있는 힘은 3㎏에 달한다. 손 관절부를 연결하는 뼈대(링크) 구조를 다변화 해 구동 과정 중 힘 손실을 최소화한 결과다.
로봇 손끝과 손가락 마디, 손바닥에 장치한 힘 측정 센서도 남다르다. 센서는 지름 15㎜, 무게 5g 이하 초소형이다. 물체에서 가해지는 압력과 방향을 정밀 감지한다. 물체를 쥐는 힘을 세밀하게 조절할 수 있게 한다. 연구팀은 서울대와 공동연구로 피부형 촉각 센서도 로봇 손에 장착했다. 이 센서는 물체와 닿을 때 접촉 부위 분포와 힘을 측정한다.
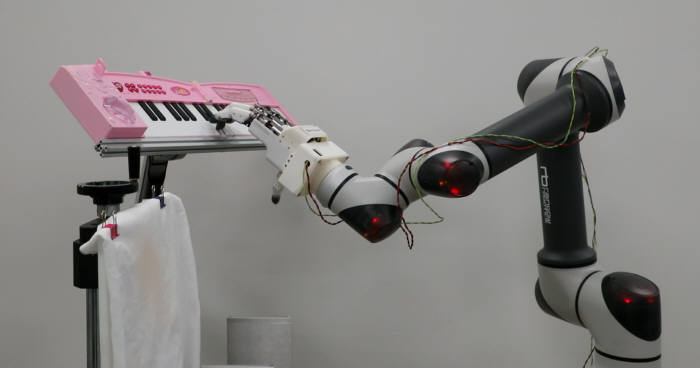
도현민 박사는 “로봇 손은 사람의 섬세한 손 움직임을 모방해 다양한 물체를 다룰 수 있다”며 “로봇 손 알고리즘이나 로봇 손 조작지능을 연구하기 위한 플랫폼으로도 활용 가능하다”고 말했다.
대전=김영준기자 kyj85@etnews.com


































