로봇공학계에 앙팡테리블(무서운 아이)이 나타났다.



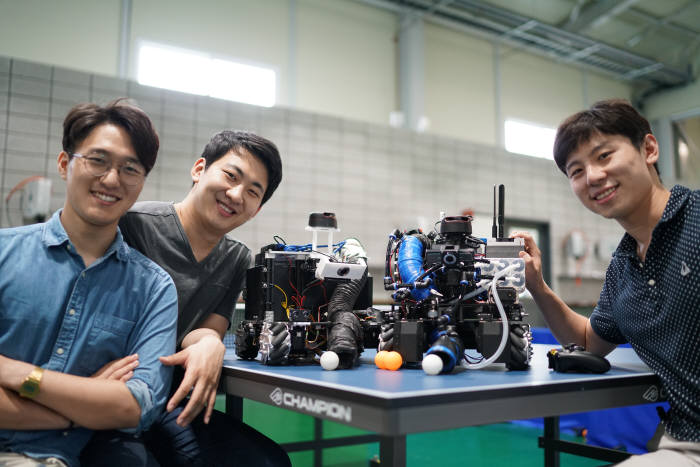
류길현(26·서울대 전기과), 심영우(26·서울대 기계과) 연승호(27·KAIST 전기과)씨가 세계 최고 권위의 '국제로봇학술대회(ICRA)' 2018년 포럼에서 논문을 발표한다. 포럼은 5월 21일부터 닷새 동안 호주 브리즈번에서 열리며, 미국전기전자공학회(IEEE)가 주최한다.
ICRA는 로봇공학자에게 꿈의 무대다. 박사나 교수도 나가기 어렵다. 학부생이 논문을 발표하는 것은 10년에 한 번 있을까말까 한 일이다. 인터뷰에 응한 류길현·심영우씨는 “처음에 주변에서 안 믿었다”면서 “논문을 찾아 공부하던 곳에서 발표하게 돼 기쁘다”고 입을 모았다.
이들은 지난해 상반기 네이버랩스 인턴십 과정에서 자율 주행을 하면서 물체를 빨아들이는 로봇 'TT봇'을 개발했다. 세계 무대에서 주목 받고 있는 로봇이지만 시작은 생활 속의 작은 불편함에서 비롯됐다. 이들은 연구소 내 탁구대 주변에 떨어진 공을 수거하는 로봇을 기획했다. 3개 버전을 거치며 다양한 크기의 사물을 줍는 로봇으로 발전했다. 주변을 인식하며 자율 주행하는 분야 어디에나 쓰일 수 있는 범용성을 갖췄다.
TT봇은 이들 학부생의 치열한 고민과 열정의 산물이다. 수많은 시행착오를 거쳐야만 했다. 로봇이 물체를 인식하고 담기까지 전체 과정을 신경망으로 이어서 하나의 연산으로 수행하게 하려면 막대한 컴퓨팅 파워가 들어간다. 일반 방식이지만 크기가 작은 로봇에 적용하기엔 물리적으로 불가능했다. 연산 병목 현상이 일어나 도중에 멈추거나 속도가 크게 느려졌다. 이를 해결하기 위해 먼저 물체 위치를 인식해서 이동하게 하고, 이동 시간에 물체의 크기 등을 인식하도록 연산 과정을 나눴다. 속도는 기존보다 10~20배 높였다.
소형이라는 크기 때문에 시야가 제한돼 로봇이 '물체가 있을 만한 곳'을 예상하도록 학습시켜야 했다. 여러 물체가 흩뿌려진 상황에서 최적의 경로를 찾아야 했다. 6개월이라는 짧은 기간의 현실에서 공을 뿌려 가며 구현하기가 어려웠다. 로봇이 공을 줍는 상황을 시뮬레이션으로 제작, 가상 공간에서 몇 배속으로 학습시킬 수 있었다. 이런 고민 과정에서 국내 특허도 다섯 개나 출원 신청했다.
네이버랩스의 전폭 지원도 한몫했다. 학부생 인턴에게도 다른 연구원과 마찬가지로 자유롭게 과제를 선정해서 연구하는 기회를 제공했다. 수천만원에 이르는 고가 장비 구매도 지원했다. 국내 기업이나 연구실 인턴십에서 경험하기 어려운 일이었다. 이미 자율 주행 실내 측위 로봇 'M1'을 만든 네이버 노하우도 난관 극복에 도움이 됐다.
류길현·심영우씨는 “로봇을 만들어 보고 싶었지만 국내에서 지원하는 곳을 찾기가 쉽지 않아 고민하다가 네이버랩스 소식을 듣고 인턴에 지원했다”면서 “연산 병목 문제 해결 과정에서 M1 개발의 노하우가 큰 도움이 됐다”고 설명했다.
이들은 대학 전공과 상관없이 꿈을 찾는 다양한 시도를 해보라고 조언했다. 심영우씨는 로봇이라는 꿈을 품기 전에 밴드, 해외 교류 등을 경험했다. 류길현씨는 미디어아트와 애플리케이션(앱) 개발을 하는 과정에서 로봇에 흥미를 기울이게 됐다. 두 학생은 올해 미국 유수 대학의 연구실에 지원, 석·박사 과정을 밟는다. 연승호씨는 이미 매사추세츠공대(MIT) 연구실에 들어갔다.
류길현·심영우씨는 “우리 두 사람의 공통점은 좋아하는 것을 찾기 위한 다양한 시도 결과 로봇 개발에 매진하게 됐다는 것”이라면서 “어떤 길을 가든 일상에서 사람과 함께 지낼 수 있는 로봇을 만들기 위해 최선을 다하겠다”고 말했다.
오대석기자 ods@etnews.com