고속도로를 달리던 중 앞차의 갑작스런 제동으로 피치 못할 추돌사고가 났다면 누구의 잘못일까? 많은 이들이 갑작스럽게 제동을 한 앞 차의 과실이라고 생각하기 쉽지만, 사실 이 경우 뒤차의 과실이 더 크다. 앞 차와의 충분한 안전거리를 확보하지 않았기 때문에 사고가 일어난 것으로 보기 때문이다.

실제로 도로교통법 제19조(안전거리 확보 등) 1항에 따르면 `모든 차의 운전자는 같은 방향으로 가고 있는 앞 차의 뒤를 따르는 경우에는 앞 차가 갑자기 정지하게 되는 경우 그 앞차와의 충돌을 피할 수 있는 필요한 거리를 확보해야 한다`고 적고 있다.
위와 같은 규정 때문에 안전거리는 주행속도는 물론 도로상황 및 기상상태 등 여러 외부 요인에 따라 그 거리가 달라진다. 즉 어떠한 상황에서라도 뒤차의 정지거리가 앞차와의 간격보다 항상 길어야 급작스런 제동에도 사고를 피할 수가 있다는 말이다.
이때 정지거리는 공주거리와 제동거리의 합으로 나타낼 수 있다. 공주거리란 위험한 상황의 발생 후 운전자가 이를 인지하고 대응하는데 걸리는 거리를 일컫고, 제동거리는 운전자가 브레이크를 밟고 나서 차가 완전히 정지할 때까지 진행한 거리를 말한다.
정지거리 역시 주행속도에 따라 달라진다. 시속 80㎞ 속도에서는 정지거리가 56m, 시속 100㎞ 속도에서는 정지거리가 약 88m 정도 된다. 이는 급정거 시 최소한의 정지거리를 산출한 것으로 안전거리는 이보다 넉넉하게 확보한 후 주행해야 한다.
도로교통공단은 애매한 안전거리를 쉽게 계산하기 위해 일반도로에서는 `속도계 수치 -15`, 고속도로를 주행할 때는 `속도계 수치` 만큼 안전거리를 유지하라고 충고한다. 즉 일반도로에서 시속 50㎞로 주행하고 있다면 앞차와의 간격을 35m 정도 유지하는 것이 안전하고, 고속도로에서 시속 100㎞로 주행하고 있다면 안전거리를 100m 정도 확보해야 한다는 것이다.
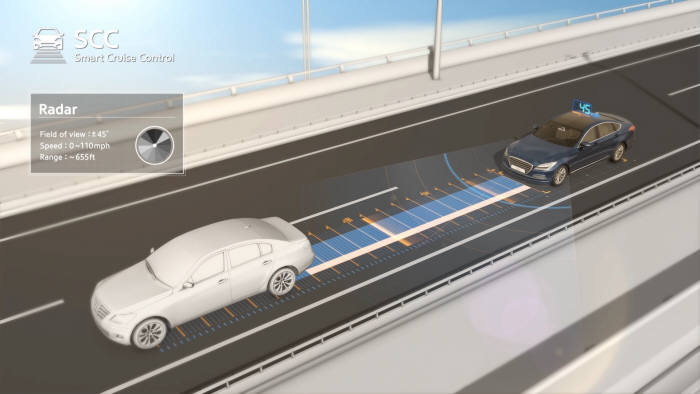
안전거리를 확보하기 쉽도록 도와주는 전자장치들도 속속 개발되고 있다. 레이더 센서를 사용해 앞 차와의 적정거리를 유지해 주는 SCC(스마트크루즈컨트롤)이나 차량 전방의 카메라를 사용해 전방의 위험상황을 감지하는 FCW(전방 위험차량 경보시스템)가 대표적이다.
특히 현대모비스는 최근 기존 30만 화소 차량용 카메라에서 더 나아가 국내 최초로 100만 화소 이미지 센서를 적용한 통합영상인식 전방 카메라 개발에 성공했다. 이를 통해 기존 전방 70m까지 영상인식이 가능하던 것이 100m 이상까지 인식이 가능해져 앞 차와의 안전거리 유지에 크게 도움이 될 것으로 기대된다.
류종은 자동차/항공 전문기자 rje312@etnews.com