MIT 생체모방기술 로봇연구소(Biomimetics Robotics Lab)는 지난 2009년부터 완전 자립 주행 로봇인 치타(Cheetah)를 개발하고 있다. 이 로봇은 전선에 연결한 고정 상태에서 22km/h로 달리는 모습이 공개되기도 했지만 최근에는 알고리즘을 개선하면서 아무런 지원 없이 자립 주행이 가능하게 됐다고 한다.
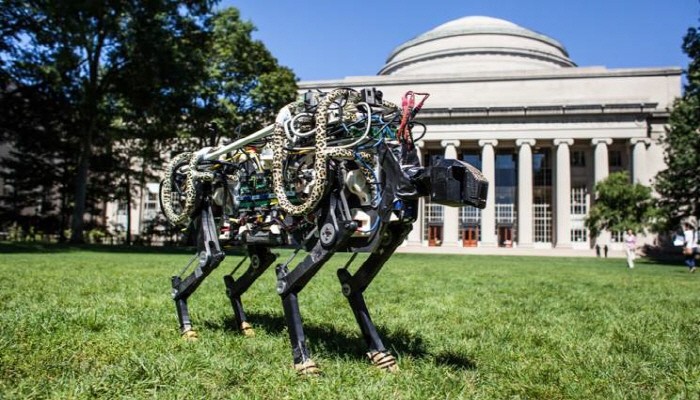
연구소 측이 공개한 동영상을 보면 치타가 어떻게 진화해왔는지 알 수 있다. 지난 2012년에는 다리 4개를 이용해 처음으로 자력으로 걷는데 성공했다. 하지만 당시만 해도 철사나 암 등 본체와 고정되어 있는 보조 기구가 필요했다. 이어 지난해에는 22km/h로 달릴 수 있게 됐다.
치타는 이후에도 개선을 계속해 최신 알고리즘을 적용, 다리 4개로 매끄럽게 작동할 수 있게 됐다고 한다. MIT가 운동장 내에서 실시한 시운전에서 치타는 보조 기구 도움 없이 완전 자립 주행에 성공했다. 그 뿐 아니라 실내 연구소 실험에선 33cm 높이 장애물을 점프하는 데에도 성공했다.
연구소 측은 새로운 알고리즘을 이용하면 치타의 최고 속도가 48km/h에 달할 것으로 추정하고 있다. 이 알고리즘을 통해 치타는 네 다리가 착지할 때 제대로 힘을 지탱한다.

또 보통 빨리 주행하는 로봇은 추진력을 높이는 데 주력한다. 하지만 치타는 마치 유명 스프린터의 주행 방법과 비슷한 제어 방식을 이용한다. 우사인 볼트를 포함한 스프린터는 다리 회전이 빠른 게 아니라 다리를 길게, 그리고 더 힘차게 땅을 걷어 올리면서 달리기 때문이다.
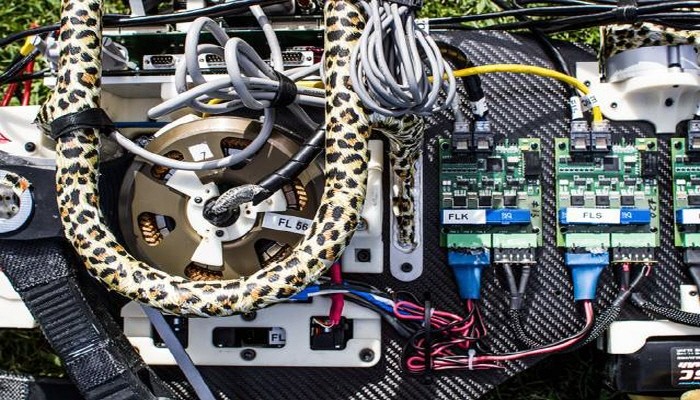
하지만 로봇 대부분은 동작이 느리고 무게도 무거운 탓에 고속으로 움직일 때 컨트롤이 잘 되지 않는다. 치타는 달리면서 장애물을 뛰어 넘는 데에도 성공했는데 이것 역시 다른 로봇과 다른 치타만의 특별한 부분이다. 치타가 이렇게 다양한 동작을 하는 건 토크가 높은 전기 모터 덕분이다. 치타는 얼마 전 유행한 아이스버킷 챌린지에 참여하기도 했다. 치타에 대한 자세한 내용은 홈페이지에서 확인할 수 있다.
전자신문인터넷 테크홀릭팀
이상우기자 techholic@etnews.com