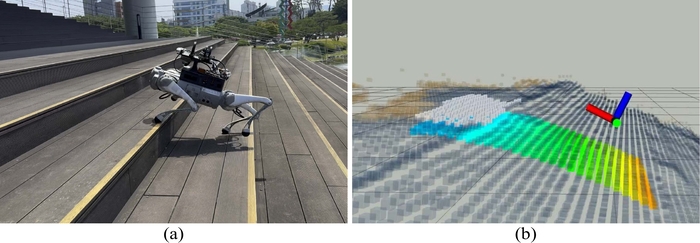
한국과학기술원(KAIST·총장 이광형)이 시각 정보 없이 지형을 추정할 뿐 아니라, 센서로 주변 환경을 인식하고, 스스로 판단해 걷는 사족보행 로봇 기술을 개발했다.
KAIST는 명현 전기 및 전자공학부 교수팀이 연구실 창업기업 유로보틱스와 공동 연구로 사족보행 로봇 제어 기술 '드림워크++'를 개발했다고 12일 밝혔다.
드림워크는 관절 엔코더와 관성 센서 등 자기수용 감각만으로 지형을 추정·보행하는 '블라인드 보행' 기술로, 시각 정보 없이 안정적인 이동이 가능하지만 로봇 다리가 장애물에 직접 접촉한 이후에야 움직임을 조정할 수 있다.
드림워크++는 자기수용 감각, 카메라·라이다 기반 외수용 감각을 융합해 한계를 극복했다. 장애물을 사전 인지하고 선제적으로 보행 전략을 조정하는 '인지 기반 보행'을 구현했다.
연구팀은 이를 위해 다중 감각 강화학습 구조를 설계했고, 경량 연산 기반으로 실시간 제어가 가능하다. 또 센서 오류 발생 시 자동으로 다른 감각 기반 보행으로 전환하는 안정성, 다양한 로봇 플랫폼에 적용 가능한 확장성을 동시에 확보했다.
성능을 실험으로 입증했다. 계단 주행 실험에서는 50개 계단(수평 30.03m, 수직 7.38m) 코스를 35초 만에 완주하며, 블라인드 보행 제어기와 상용 인지형 제어기를 모두 능가했다.
급경사 환경에서는 35도 경사면을 안정적으로 등반했고, 자세를 능동 조정해 후방 다리 모터 토크를 기존 대비 약 1.5배 절감했다.
또 다양한 장애물 상황에서 별도 경로 계획 없이 효율적인 경로를 스스로 선택하는 등 학습 기반 인지 능력을 보였으며, 불확실한 낙차 지형에서는 자발적으로 멈춰 지면을 탐색한 뒤 이동하는 '탐색 행동'도 확인됐다.
2.5㎏ 탑재물을 실은 상태에서도 로봇 높이를 넘는 41㎝ 장애물을 극복하는 등 높은 민첩성을 입증했다. 기존 사족보행 로봇에 기술을 적용한 시뮬레이션에서는 스위스 취리히연방공대의 '애니멀-C'로는 최대 1m, KAIST 하운드(박해원 기계공학과 교수팀)로는 1.5m 수준 장애물까지 대응 가능한 것으로 나타났다.
특히 이 기술은 27㎝만 학습했음에도, 실제 더 높은 42㎝ 계단에서도 약 80% 성공률을 기록했다. 새로운 환경에도 적응할 수 있는 능력을 갖췄다는 의미다.
명현 교수는 “이번 연구는 로봇이 단순히 움직이는 수준을 넘어, 환경을 이해하고 스스로 판단하는 단계로 발전했음을 보여준다”라며 “향후 다양한 실제 환경에서 활용 가능한 지능형 이동 기술로 확장해 나갈 것”이라고 밝혔다.
이 연구성과는 세계 최고 권위의 로보틱스 저널 IEEE 트랜스액션즈 온 로보틱스에 2월 게재됐다.
김영준 기자 kyj85@etnews.com