#지난해 4월 한국로봇융합연구원(KIRO)은 폴리시스와 공동으로 세계 최초 무인지능 자동화 기능을 보유한 스마트 콘크리트 폴리싱(Polishing) 로봇을 개발했다. 사람 대신 건물바닥을 연마하고 광택작업을 수행하는 무인로봇이다.
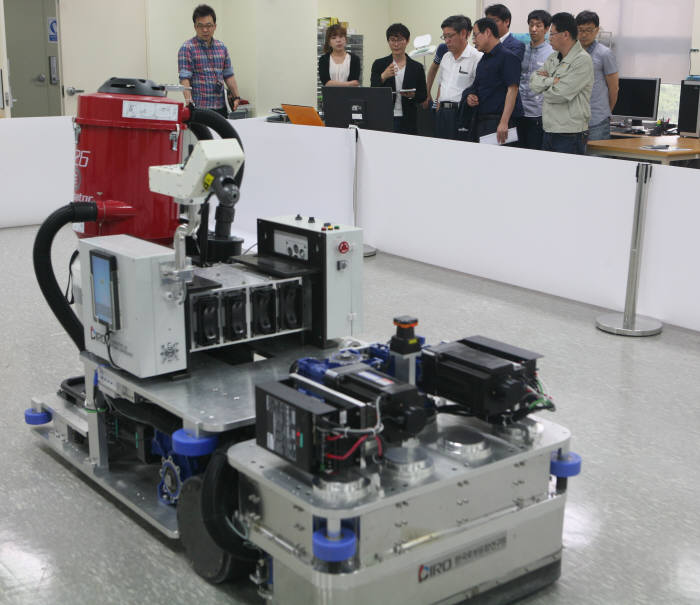
#KIRO는 지난해 12월 포항 유강정수장에서 제타크리젠과 공동 개발한 국내 최초 정수장 수중 청소로봇 성능 실증 실험을 마쳤다. 수중 청소로봇은 정수장 수조바닥에 쌓인 오염슬러지를 별도 배수작업 없이 수중에서 청소, 지상 후처리 작업 장치로 내보내는 임무를 성공적으로 수행했다.
로봇융합 핵심기술개발에 주력하고 있는 한국로봇융합연구원(KIRO)이 우리나라가 로봇강국으로 도약하는 중심역할을 톡톡히 수행하고 있다.
KIRO는 주요 미션인 로봇융합 연구개발(R&D) 분야에서 지난 4년간 탁월한 성과를 이뤄냈다. 세계 최초, 국내 최초라는 수식어가 붙는 다양한 로봇제품을 잇따라 내놓았다. 로봇융합기술분야 글로벌 선도연구기관 이미지를 굳혀가고 있다.
주요 성과는 산업현장에서 작업을 보조하는 로봇, 의료 및 재활로봇, 해양로봇 등 3개 로봇연구본부를 통해 이뤄진다.
KIRO 필드로봇연구본부는 인간 행복 증진을 위한 로봇 기술개발에 매진하고 있다. 인간을 보다 편하고, 건강하며 즐겁게 해줄 실용 로봇개발이 연구목표다. 현재 특수환경에서 인간 대신 작업할 수 있는 특수목적 서비스로봇과 재활에 필요한 생체신호기반 재활로봇, 증강현실 기반 상호 인터페이스 플랫폼 개발을 진행 중이다.
지난해 개발한 경북 제1호 건설로봇 스마트 콘크리트 폴리싱 로봇은 건물 콘크리트 마감공사를 위한 무인자율작업로봇이다. 열악한 환경에서 수동으로 조작하는 장비위주의 건설현장에 무인 자동로봇을 투입해 새로운 건설로봇생태계를 만드는 계기를 마련했다.

대구디지털산업진흥원과 실감 인터렉티브 모션플랫폼 기술도 공동개발 중이다. 총 사업비 98억원(국비 49억원, 민간 49억원)을 투입해 실감 게임 시뮬레이터와 실감 대화면 인터랙션 기술을 개발하는 과제다. KIRO는 범용 다축 모션 플랫폼을 맡아 기업과 공동으로 로봇플랫폼 기반 아케이드 게임플랫폼을 완성했다.
연구개발특구진흥재단 지원을 받아 사업비 6억5000만원을 투입, 경북대와 공동으로 족관절 외골격을 이용한 보행 재활시스템도 개발했다. 편마비 환자의 능동적 보행훈련지원이 가능한 시스템으로, 이동하면서 보행훈련이 가능한 플랫폼도 추가 개발 중이다. 재활의료기기분야 수입 대체 효과가 클 것으로 기대된다.
KIRO 해양로봇연구본부는 해양로봇 핵심기술과 상용화에 주력하고 있다. 수중건설과 선박안전, 수중탐사분야에 활용 가능한 로봇개발이 한창이다.
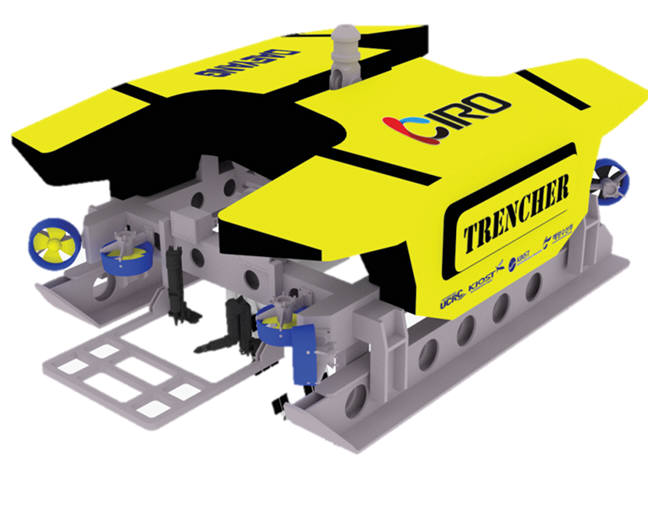
연구본부는 해양수산부 주관 해양장비개발 및 인프라 구축사업(총 사업비 813억원) 중 `ROV(remotely operated vehicle) 기반 수중 중작업용 로봇기술 개발(사업비 170억원)`을 수행 중이다. 산학연 컨소시엄을 통해 2019년까지 2500m 심해에서 운용가능한 케이블 매설로봇을 개발할 계획이다.
연구본부는 수중 인공구조물을 정밀탐사할 수 있는 수중로봇 자율유영기술과 외부 투입형 선박 파공 봉쇄장치도 개발하고 있다. 2019년까지 67억원을 투입하는 선박파공 봉쇄장치는 선박 외벽주행기술과 파공 봉쇄용 앵커 및 패드 기술, 파공 봉쇄 훈련용 시뮬레이터 개발이 핵심이다. 장치가 개발되면 선박 기름유출 사고에 초기 대응이 가능해 해양오염 확산을 막을 수 있을 것으로 기대된다.

KIRO 제조로봇연구본부의 목표는 세계 최고 산업현장 적용 로봇기술 개발이다. 다관절 구조 로봇 팔을 포함, 제조산업 현장에 활용할 수 있는 이동형 로봇 및 다양한 형태의 로봇을 개발하고 있다.
연구본부는 현재 제철소 현장 작업자의 근력지원로봇, 배관 내부 검사 및 청소로봇, 중공업 현장 이동형 용접로봇, 물품 반출입 및 검사로봇, 물류 이송로봇 등을 주로 개발한다.
근력지원로봇으로는 웨이트밸런스 결합형 로봇과 허리근력지원로봇, 전신형 근력지원로봇을 포스코와 공동으로 개발했다. 근력지원 로봇이 산업현장에 확산되면 무거운 물건을 옮기는 작업자의 노동부담을 들어주고 근골격계 질환예방에 도움을 줄 전망이다.

포스코와는 이미 가스를 이송하는 배관 내부 청소로봇을 개발했고, 한국가스공사와 천연가스 배관을 검사할 수 있는 로봇도 공동개발중이다.
연구본부는 그 외 해양플랜트 용접로봇과 자율 이적재를 위한 이동형 로봇도 개발하고 있다. 용접로봇은 특히 6축 경량로봇팔과 모바일 기술이 결합된 자율 이동 구조로 용접으로 인해 발생되는 고온, 고분진 환경에서 유용하게 사용될 것으로 기대된다.
포항=정재훈기자 jhoon@etnews.com