애완동물과 같이 주인을 식별하고 주인 곁에서 행동을 따라하거나 명령을 수행할 수 있는 로봇이 개발됐다. 향후 다수 로봇이 협업해 행동하는 군집로봇 실용화를 앞당길 것으로 기대된다.
경북대 자율군집 소프트웨어(SW) 플랫폼 연구센터(센터장 강순주·이하 연구센터)는 임베디드 SW 플랫폼 독자 기술을 기반으로 주인의 행동과 연동하는 로봇 ‘펫봇(Pet-Bot)’을 개발했다고 7일 밝혔다.
펫봇은 연구센터가 2014년 개발한 스마트 단말(모델명 PAAR Watch)과 연동, 단말을 착용한 주인을 알아보고 행동을 따라하는 사용자 행동 자율연동 로봇이다.
PAAR(Personal Activity Assisting & Reminding) 워치는 현재 세계적으로 출시되고 있는 스마트 워치와 달리 자율 사물통신 기능을 내장한 스마트 단말기다.
단말기에는 연구센터가 개발해 GS(Good Software) 인증을 받은 실시간 운용체계(유비노스:UBINOS)와 자율통신 SW스택 등 순수 토종 SW기술이 적용된 제품이다.
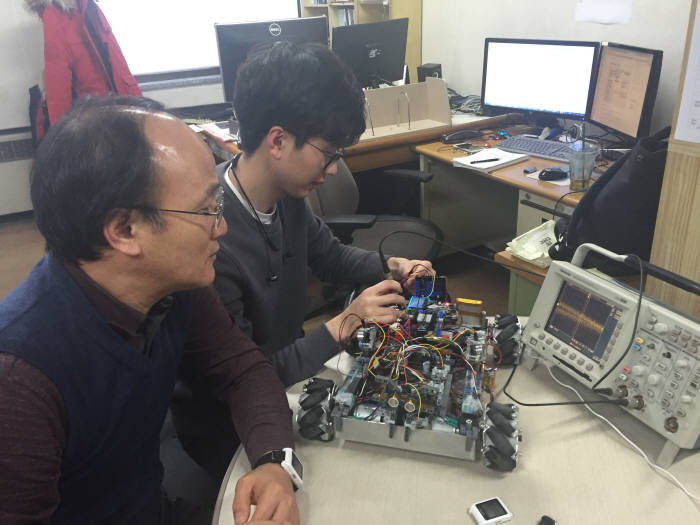
펫봇은 주인이 착용한 PAAR 워치와 실시간 통신하며 주인을 식별한다. 주인과 일정한 거리를 항상 유지하며 앞과 뒤에서 주인의 행동을 예측해 따라오기와 정지하기, 엘리베이터 타기 등을 수행할 수 있다.
그동안 영상인식 기술을 이용해 사람을 따라오는 로봇 기술은 개발됐지만 앞서가기는 불가능했다. 실시간 영상인식을 위해 고가의 장비를 내장해야하기 때문에 실용화의 걸림돌이 됐었다.
또 실내에 수많은 고정형 위치센서를 설치해 사용자와 로봇에 대한 3차원 정밀위치를 실시간 측정한 기술도 개발됐지만 고가의 정밀측위 인프라를 갖춰야해 실험실 수준에 그치고 있다.
연구센터가 개발한 펫봇은 사람과 로봇간 자율연동을 위해 별도의 통신 인프라를 구축할 필요가 없다. 저가의 LF(Low Frequency) 및 RF(radio frequency) 무선통신기술을 사용했다.
사람이 로봇을 직접 조작하거나 원격 조종기를 이용해 운전할 필요가 없다. 로봇은 사람이 언제든지 확인 가능한 위치에 있으며 사용자 이동방향을 스마트 단말을 통해 로봇이 인지해 예측 이동하는 개념이다. 사람과 로봇이 일대일이나 일대 다수로 협업해 작업이 가능하다.
순수 자체기술로 개발한 실시간 자율사물통신 및 사용자 행동인지 기술을 적용해 다양한 분야 실용화를 앞당길 것으로 전망된다.
전화통화 중에 로봇과 협업해 물건을 운반하거나 유모차나 쇼핑카트, 공항에서의 짐 운반 등에 이번 펫봇 기술을 적용할 수 있다.
강순주 센터장은 “같은 기능과 형상을 가진 다수 로봇이 협업 행동하는 것을 군집로봇이라고 하는데 영화에서나 볼 수 있는 로봇들간 군집 지능(Swarm Intelligence)을 실현한 사례는 없었다. 이번 펫봇은 사람의 행동과 연동되는 군집 지능을 실현할 수 있는 첫 단추”라고 말했다.
연구센터는 펫봇 기술을 상용화하기 위해 현재 응용분야를 선정해 구체적 형상을 가진 펫봇 개발에 나섰다. 또 펫봇이 자율적으로 합체 및 분리해 형상을 동적으로 변형하는 다형성 군집로봇(polymorphic swarm robotics)을 위한 연구도 진행할 계획이다.
대구=정재훈기자 jhoon@etnews.com