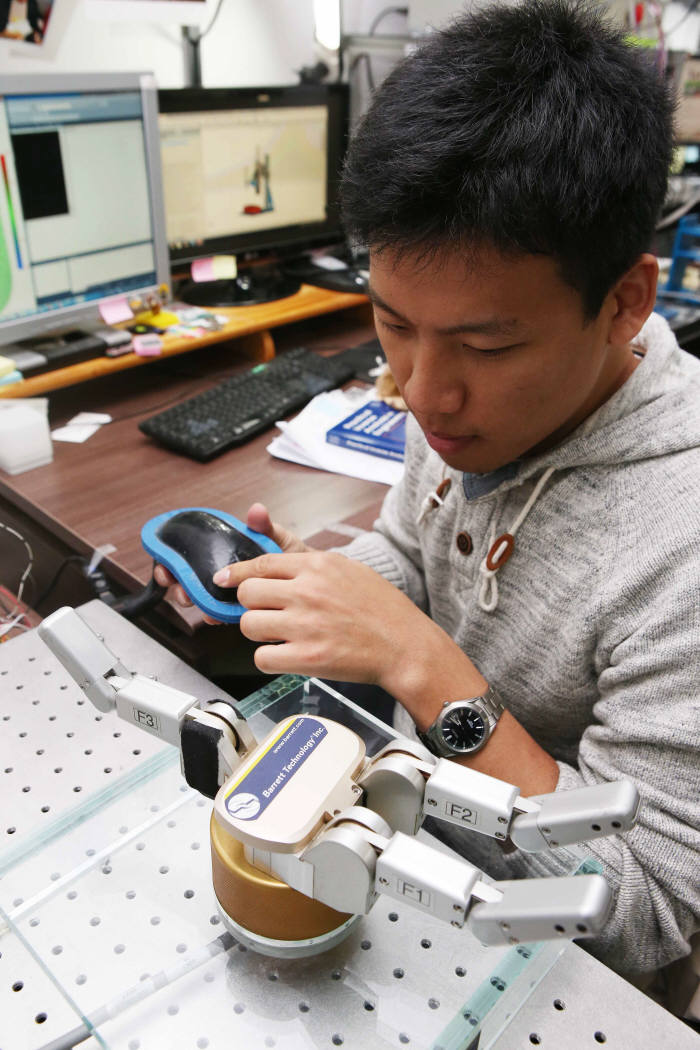
한국과학기술원(KAIST·총장 강성모)이 실리콘과 탄소 소재로 외부 접촉을 측정하는 로봇 피부를 개발했다. 로봇용 외피는 물론 새로운 형태의 컴퓨터 인터페이스로도 활용할 수 있다.
KAIST는 김정·박인규 기계공학과 교수팀이 내구성과 촉각 감지 성능을 대폭 향상시킨 로봇용 촉각 센서를 개발했다고 2일 밝혔다.
현재 시각·청각 분야 로봇 감각기술은 인간의 감각에 근접했다. 하지만 촉각은 로봇 전 부분에서 환경 변화를 감지해야 해 만드는데 한계가 있었다. 외피 전체에 센서를 분포, 연결하는 기술이 필수적이다. 높은 신축성과 내구성도 필요하다.
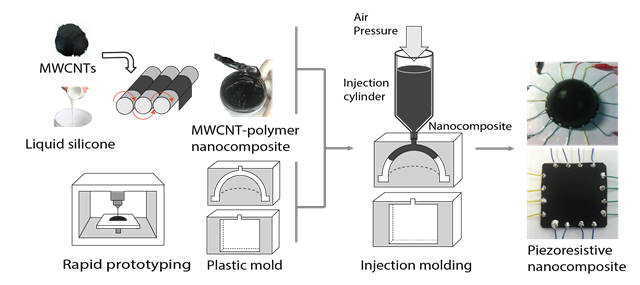
연구팀은 실리콘과 탄소나노튜브(CNT)를 혼합한 `압저항 복합재`로 센서 외피를 만들었다. 압저항 복합재는 외부에서 압력이나 힘이 가해지면 해당 부위의 전기적 저항값이 달라지는 성질을 가진다.
달라진 저항값 측정에는 의료 영상기법인 전기임피던스영상법(EIT)을 적용했다. 센서 표면에 수많은 전극을 부착하고 전류를 흘려 전류 전위차, 센서 안쪽의 저항 분포를 계산한다. 이 기술을 적용하면 복잡한 전기 배선 없이도 넓은 면적의 촉각 변화를 파악할 수 있다.
센서는 망치로 내려치는 수준의 강한 충격도 견딜 수 있다. 센서 일부가 망가져도 파손 부위에 복합재를 채워 경화시키면 재사용할 수 있다.

제작도 간편하다. 3D프린터로 만든 3차원 형상 틀에 복합재를 넣는 방식으로 만든다. 3차원 곡면 등 다양한 형태로 구현할 수 있다.
연구팀은 이 센서를 충격흡수가 가능한 로봇 피부, 3차원 컴퓨터 인페이스, 새로운 형태의 촉각센서 등 다양한 분야에 적용할 수 있다고 설명했다.
김정 교수는 “새로 개발한 촉각 센서는 다양한 차원의 변형상태 정보를 제공한다”면서 “로봇 피부를 포함한 로봇 산업, 인체에 바로 부착하는 착용형 의료기기 분야에도 쓸 수 있다”고 말했다.
대전=김영준기자 kyj85@etnews.com