로봇의 약점 중 하나가 부드러운 재료를 잘 잡지 못한다는 것이다. 이를 해결할 수 있는 길이 열렸다. 고양이 혀 원리를 활용하는 것이다.
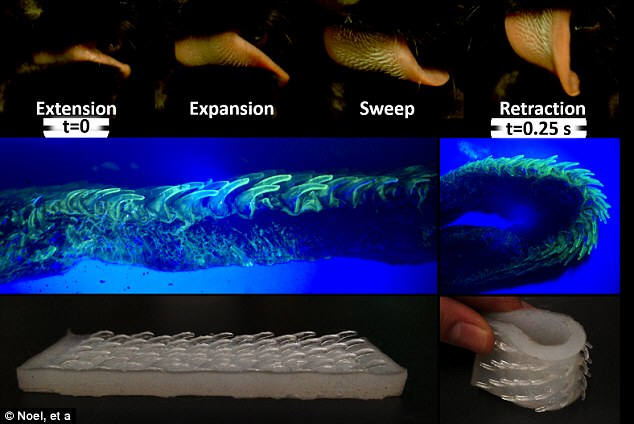
조지아공과대학교가 “부드러운 재료를 잡기 어려운 `로봇`에 고양이 혓속 돌기 원리를 적용하면 로봇이 손쉽게 재료를 잡을 수 있다”는 연구결과를 발표했다. 이 대학 생체모방연구실은 20~22일(현지시간) 열린 미국 물리학협회 유체역학부문(DFD) 제69차 연례 회의에서 이 같은 연구결과를 발표했다. 연구팀은 고속 비디오카메라로 촬영된 고양이 혀의 원리를 캡처해 특징을 파악했고, 고양이 혀를 400% 확대해 3D프린터로 인쇄했다.
고양이 혀에는 0.5㎜ 정도 크기의 작은 돌기가 촘촘히 돋아있다. 이를 `사상유두`라고 한다.
돌기가 뾰족해 털 고르기에 제격이다. 그래서 고양이는 혀로 자신의 온 몸을 털고르기 한다. 이를 `그루밍`이라고 부르기도 하는데, 척추 아래 머리카락이나 털까지 혀로 간단하게 정리할 수 있다. 혀 표면 돌기가 털 사이 먼지를 걸러내 깨끗한 상태를 유지할 수 있는 것이다.
노엘 조지아공대 박사는 “고양이 혀와 그 모방제품은 청소와 털이 엉킨 것을 제거하는 능력이 뛰어나다”고 말했다. 고양이가 그루밍하는 동안 혀의 모양과 유연성을 확대해 조사했는데, 이 사상유두가 마치 작은 갈고리처럼 보였다고 설명했다.
노엘 박사는 “기존 머리빗 돌기는 두껍고 직선의 딱딱한 모양으로 머리를 빗을 때 두꺼운 이물질이 묻으면 손으로 제거해야 한다”면서 “반면 고양이의 유연성 있는 혓속 돌기는 이를 제거하는데 훨씬 쉽다”고 말했다.
그는 “이 연구결과가 `소프트 로봇`의 미래에 영향을 미칠 것”이라면서 “생체모방원리는 청소 제품, 머리빗, 의료 분야까지 광범위하게 적용될 수 있다”고 말했다. 현재 과학자들은 부드러운 재료의 표면을 잡을 수 있는 방법을 만드는데 어려움을 겪고 있다. 고양이 혀에서 답을 찾을 수 있다고 설명했다.
연구팀은 호랑이, 사자 같은 다른 고양이과 동물을 연구해 고양이 혀 돌기를 더욱 자세히 연구할 계획이라고 밝혔다.
송혜영기자 hybrid@etnews.com