최근 글로벌 자동차 업계의 가장 뜨거운 감자는 단연 ‘자율주행’ 기술 개발이라고 할 수 있다. 관련 업계에서는 2020년께 자율주행차가 도로 위를 달릴 것으로 예상한다. 하지만 최근의 기술 개발 추이를 보면 그 시기는 더욱 앞당겨질 전망이다.
자율주행차는 기본적으로 차량에 장착된 센서를 통해 주변 상황을 인식하고, ECU 등에서 그 상황에 대한 정보를 파악 및 판단해 기계장치들을 제어함으로써 이뤄진다. 자율주행의 요소 기술은 크게 세가지 분야로 나눠지는데 인지·측위(위치측정)·제어가 그것이다.
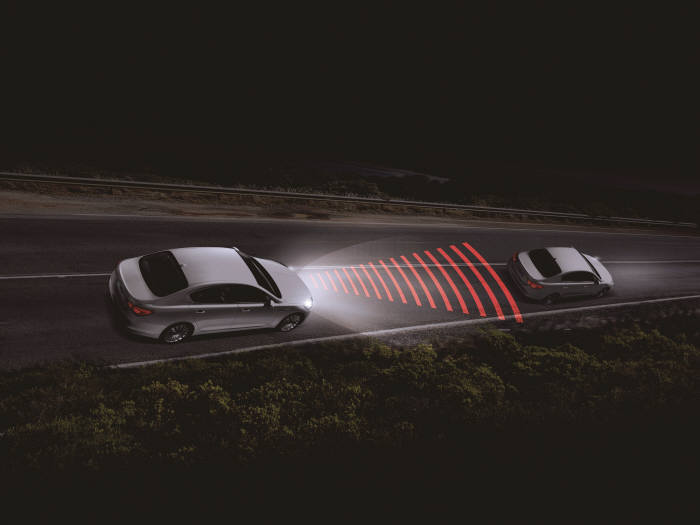
사람이 오감을 이용해 상황을 인식하듯 자동차는 센서를 통해 주변 환경을 인식한다. 현재 운전자의 안전과 편의를 위해 확산되고 있는 다양한 지능형운전자보조시스템(ADAS:Advanced Driving Assist System) 기술은 레이더, 초음파 및 카메라 센서를 기반으로 하고 있다. 하지만 향후 무사고 자율주행 시스템을 이루기 위해서는 보다 정교하고 정확하게 상황을 인지할 수 있는 새로운 센서 기술 보강이 필수적이다.
하지만 차량 센서가 아무리 발전해도 전방의 사고 상황이나 주행 방향의 몇 대 앞에 있는 차량이 갑자기 차선을 바꾸는 상황까지는 파악하기 힘들다. 이에 따라 차량과 사물 간의 통신을 의미하는 ‘V2X(Vehicle to X)’ 기술 발전이 함께 이뤄져야 한다. 즉, 차량과 인프라 혹은 차량과 차량이 서로 통신을 통해 정보를 주고받으며 주변 상황을 공유함으로써 차량 주변뿐만 아니라 더 넓은 지역의 환경을 정확하게 인지할 수 있게 되는 것이다.
또 출발지부터 목적지까지 완벽한 자율주행을 위해서는 실제 위치와 차량이 스스로 인식하고 있는 위치가 정확히 일치해야 한다. 이 때문에 상대적으로 오차가 큰 기존 GPS보다 더 정밀하게 차량 위치를 파악할 수 있는 측위 기술 확보와 고정밀 지도 구축이 선행돼야 한다. 측위 기술은 정확한 차량의 위치를 산출하는 기술이다. 실제 차량 위치와 차량이 스스로 인식하고 있는 차량 위치를 디지털 지도에서 정확히 일치시키는 것이 목표다.
자율주행이 운전자 편의를 극대화하는 궁극적인 미래 자동차 기술임은 분명하지만, 무엇보다 안전성을 최우선으로 확보해야 한다. 글로벌 완성차 및 부품 업체들이 안전성 확보를 위해 주행시험장에서 자율주행 시험을 반복적으로 하는 배경이다.
현대모비스의 경우, 경기도 화성 자동차안전연구원(KATRI) 주행시험장에서 자율주행 시험을 실시하고 있다. 현대모비스의 자율주행차는 GPS 신호를 보정해 위성신호의 정확도를 높이는 안테나, 차량정보 및 주행정보를 한눈에 보여주는 스마트패드, 장애물을 보다 정확하게 인식하는 레이저 센서, 차량을 통합 제어하는 오토박스 등이 장착됐다. 이 차량은 직선 및 곡선주로와 교차로 등 다양한 도로 상황과 전방 차량 추월, 보행자 감지 제동, 교차로 교행 차량 감지 등 운전 중 일어날 수 있는 모든 상황을 가정해 안전성을 시험하고 있다. 현대모비스는 향후 인지 분야의 핵심인 센서 기술 국산화 및 내재화를 위해 관련 기술 개발을 더욱 강화한다는 계획이다.
양종석기자 jsyang@etnews.com