달 탐사에서 지하 공동 붕괴로 형성된 피트(Pit)와 용암동굴은 극심한 온도 변화와 우주 방사선으로부터 보호받을 수 있는 천연 은신처다. 그러나 급경사·암반·낙하 위험이 있는 가혹한 지형 탓에 어떤 국가도 제대로 접근하지 못했다. 이런 가운데 우리 연구진이 복잡한 기계 없이, 종이접기 구조만으로 난제 극복 기반을 마련했다.
한국과학기술원(KAIST·총장 이광형)은 이대영 우주연구원·항공우주공학과 교수팀이 무인탐사연구소(대표 조남석), 한국천문연구원(원장 박장현), 한국항공우주연구원(원장 이상철), 한양대(총장 이기정)와 함께 달 탐사 최대 난제인 피트·용암동굴에 진입할 수 있는 전개형 에어리스(airless) 휠(바퀴)을 세계 최초로 개발했다고 18일 밝혔다.
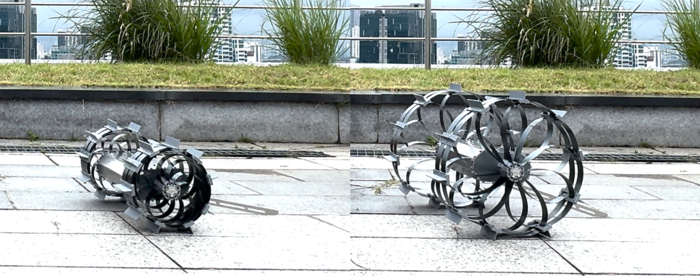
연구팀은 복잡한 기계 구조 대신 종이접기(오리가미) 구조와 소프트 로봇 기술을 결합한 새로운 전개식 바퀴를 제안했다.
'다빈치 다리'의 서로 맞물리는 구조를 응용하고, 우주에서도 잘 버티는 탄성이 좋은 금속판을 종이접기 방식으로 접어 바퀴 모양을 만든 것이다.
바퀴처럼 힌지(경첩) 같은 부품이 없어도 접힐 때는 지름 23㎝, 펼치면 50㎝까지 커져서, 탐사를 위한 소형 로버도 큰 장애물을 넘을 수 있는 뛰어난 기동성을 확보한다.

시험 환경에서도 뛰어난 성능을 보였는데, 인공 월면토(달 흙을 흉내 낸 땅)에서도 우수한 주행 성능을 보였으며, 달 중력 기준 100m 높이에서 떨어뜨려도 모양과 기능이 그대로 유지될 만큼 내충격성이 뛰어난 것으로 확인됐다.
이대영 KAIST 교수는 “이번 전개형 바퀴는 그동안 누구도 해결하지 못한 달 피트·용암동굴 진입 문제에 세계 최초로 해답을 제시한 기술”이라며 “우리나라가 앞으로 독자 달 탐사 시대를 선도하는 전환점이 될 것”이라고 강조했다.
이어 “통신·항법·전력 등 남은 과제가 있지만, 이 기술을 돌파구 삼아 하나씩 해결해 나간다면 한국의 달 탐사는 더 이상 꿈이 아니라 실행의 단계로 들어간다”고 말했다.
심채경 천문연 센터장은 “달 피트와 용암동굴은 과학·탐사 가치가 매우 높은 지역으로, 이번 성과는 그곳으로 들어가기 위한 기술적 장벽을 낮춘 의미 있는 진전”이라고 말했고, 장종태 항우연 책임연구원은 “이번 바퀴는 낮·밤 온도 차가 300도에 이르는 달의 극한 환경에서도 견딜 수 있도록 정교하게 설계된 기술로, 앞으로 실제 달 환경에서의 검증이 더욱 중요하다”고 강조했다.
이번 연구에는 이성빈 KAIST 박사과정과 조남석 무인탐사연구소 대표가 공동 제1저자로 참여했으며, '사이언스 로보틱스' 12월 호에 게재됐다. KAIST의 김세권 교수, 김준서 석사과정, 이건호·이승주 무인탐사연구소 연구원, 항우연의 장종태 책임연구원 및 심규진 연구원, 심채경 천문연 센터장, 서태원 한양대 교수가 공저자로 참여했다.
김영준 기자 kyj85@etnews.com