포스텍(POSTECH)은 김기훈 기계공학과·융합대학원 교수와 기계공학과 최서영 연구원 연구팀이 로봇 의수에 손목 회전 모듈을 도입해 신체에 무리를 주지 않고, 자연스러운 움직임을 구현하는 데 성공했다고 2일 밝혔다.

의수는 손 일부가 부분적으로 절단된 사람들에게 필요하다. 하지만 기존 의수는 손상된 부위를 대체하는 목적으로 만들어져 의수와 이어지는 손목을 움직이는 데 제한이 있었다. 그로 인해 환자는 손목을 자유롭게 움직일 수 없고, 이에 대한 보상 행동 패턴을 반복하며 팔과 상반신을 과도하게 사용했다.
연구팀은 이번에 교통사고로 엄지와 검지를 잃은 환자용 의수를 개발했다. 이 의수는 뇌에서 근육으로 보내는 신호를 센서로 감지해 움직이는데, 기존과 달리 손목 회전 모듈을 도입해 환자가 손목을 자유롭게 움직일 수 있다.
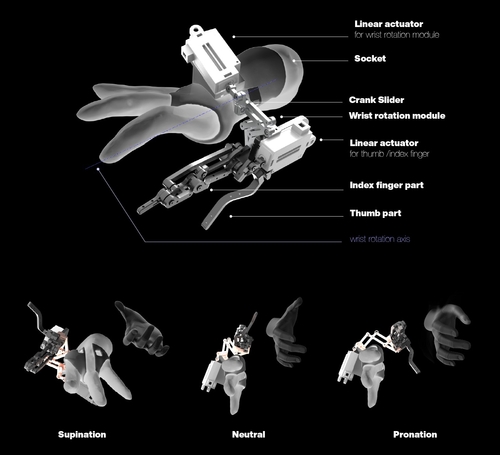
이어 연구팀은 새로 개발한 의수와 기존 의수, 그리고 정상인의 팔과 상반신 근육 움직임을 비교 분석했다. 근전도 신호와 모션 캡처 시스템으로 팔과 상반신 근육 활동을 측정한 결과, 손을 뻗어 물건을 잡는 동작에서 정상인과 기존 의수의 경우 통계적으로 유의미한 차이가 나타났다.
또 기존 의수 사용 시 어깨와 상반신 움직임이 정상인 대비 약 260% 더 높게 나타났는데, 이는 의수를 사용할 때 손목 회전이 부자연스러워 팔과 상반신을 무리하게 사용하고 있음을 의미한다.
반면, 연구팀이 개발한 의수는 상반신 움직임이 정상 수준으로 돌아왔으며, 효율적이고 자연스러운 움직임이 가능했다. 근골격계에 2차 손상을 주지 않고, 자유로운 움직임이 가능해졌다. 손 기능 평가에서도 기존 의수 대비 기능이 30% 이상 향상됨을 보였다.
김기훈 교수는 “로봇 보조기구를 만들 때 단순히 특정 신체 부위를 대체하는 것이 아니라, 이와 연결된 부위도 고려한 통합적인 접근이 필요하다”며, “로봇 의수를 안전하고 오래 사용하며 사용자가 잃어버렸던 삶을 되찾기를 기대한다”고 말했다.
이번 연구는 과학기술정보통신부 '미래유망융합기술파이오니어(STEAM)사업' 지원으로 진행됐으며, 연구결과는 최근 국제 학술지인 '신경공학 및 재활 저널'에 게재됐다.
포항=정재훈 기자 jhoon@etnews.com