80㎞/h로 달리던 자율주행자동차가 커브길에서 '강설구간' 메시지를 받더니 50㎞/h로 속도를 줄인다. 다시 속도를 내던 차량은 사고차량 정보를 300m 앞에서 수신한 후 서서히 감속한다. 달리는 것처럼 보였던 사고차량이 도로 한 가운데 서 있다. 육안으로만 확인했다면 사고로 이어질 수 있었다. 충분한 거리를 두고 사고 정보를 받아 안전하게 위험상황을 피했다.
자율주행 자동차가 도로 인프라나 다른 자동차와 통신하며 스스로 위험상황을 극복하는 '자율협력주행' 기술이 국내에서 처음 시연됐다. 센서·카메라의 인식만으로는 한계가 있었던 자율주행 수준이 도로·자동차와의 조력으로 한 단계 올라갔다. 일반도로 주행은 2020년에 가능할 전망이다.
국토교통부는 20일 중부내륙고속도로 여주시험도로에서 7가지 자율협력주행 기술을 시연하는 국제행사를 개최했다. ▶본지 8월 9일자 7면 참조
이날 시연에는 현대자동차, 쌍용자동차, 자동차부품연구원의 레벨 3 자율주행자동차가 참여했다. 레벨3는 운전자의 개입 없이 주변상황을 스스로 인지해 제동·조향 등을 할 수 있는 차량이지만, 안전에 대비해 운전자가 전방을 주시해야 하는 수준이다.

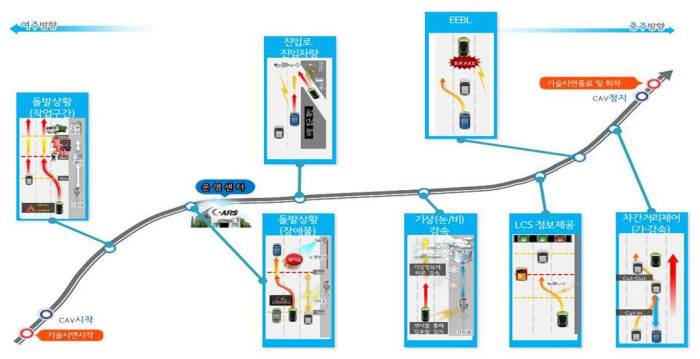
△강설구간 △전방사고 △끼어들기 △ 차선변경 △가변도로 등의 상황에서 자율주행자동차가 도로의 도움을 받아 어떻게 위험 상황을 피하는 지가 여주시험도로 7.7㎞구간에서 시연됐다.
여주 시험도로는 폐쇄된 도로로, 1㎞ 마다 WAVE(Wireless Access in Vehicular Environments) 안테나가 세워져 있다. 통신 단말기를 장착한 자율주행차는 WAVE통신을 이용해 교통정보센터로부터 실시간 수집된 정보를 수신한다. 통신 단말기를 장착한 차량끼리도 정보를 주고받으면서 위험에 대비한다.
기존 센서만으로는 인식하기 힘든 거리나 기상 변화에 대응이 가능하다는 것을 시연을 통해 보여줬다.
강설구간이 설정된 커브 구간에서는 정보 수신만으로 자동차가 스스로 속도를 제어했다. 전방에 사고가 발생했다는 돌발 상황에서도 감속했다. 전방에 갑자기 차량이 끼어든 후 속도를 줄이자 차간 간격 30m 이상을 유지하기 위해 자율주행차 역시 속도를 50㎞/h로 낮췄다.
레벨3 인증을 받은 자율주행자동차는 방향지시등 조작에 따라 차선을 자유자재로 바꿨다. 점선과 실선도로를 인지해 실선에서는 방향지시등을 켜도 차선을 옮기지 않았다. 통행이 금지된 가변도로에는 진입하지 않았다. 사각지대에 차량이 있으면 시간 간격을 두고 위험 상황이 해소된 경우에 차선을 변경했다.
이날 시연된 기술은 국토교통부 스마트 자율협력주행 도로시스템 개발 연구의 중간 결과물이다. 연구가 완료되는 2020년에는 일반도로에서 자율협력주행이 가능할 전망이다. 도로공사가 주도하는 연구로, 정부 연구비만 275억원이 투입된다.
기술이 일반화하면 미래 도로는 단순 이동공간인 '도로망'에서 서비스공간인 '디지털망'으로 탈바꿈한다. 모든 자동차·인프라·사람이 연결되는 '초연결사회'다. 교통사고나 교통체증 걱정이 사라지는 것은 물론 누구나 필요할 때 자동차를 호출해 사용하는 맞춤형 교통도 가능하다.
이날 시연에는 국내 연구진, 업계뿐만 아니라 미국 교통부, 유럽 도로교통 텔레메틱스 추진기구(ERTICO, 유럽 지능형교통체계 연구·감독기관) 등 해외 정부·업계 담당자도 참석했다. 시연과 함께 서울 더케이호텔에서 진행된 국제세미나에서는 자율협력주행에 필요한 도로 인프라, 정밀지도, 감지기술, 테스트베드(케이-시티) 등에 대한 각국의 발표가 이뤄졌다.
김현미 국토교통부 장관은 “자동차에 장착된 감지기의 한계를 인프라가 보완함으로써 자율주행의 효율성과 안전성을 크게 향상시킬 것”이라고 말했다.
문보경 산업정책부(세종)기자 okmun@etnews.com